

An Obstacle Avoidance Method Based on Dynamic Window and Virtual Target Point
A technology of virtual target and dynamic window, applied in the direction of motor vehicle, non-electric variable control, two-dimensional position/channel control, etc., can solve the problem of local oscillation of the robot, without considering the kinematics of the robot, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
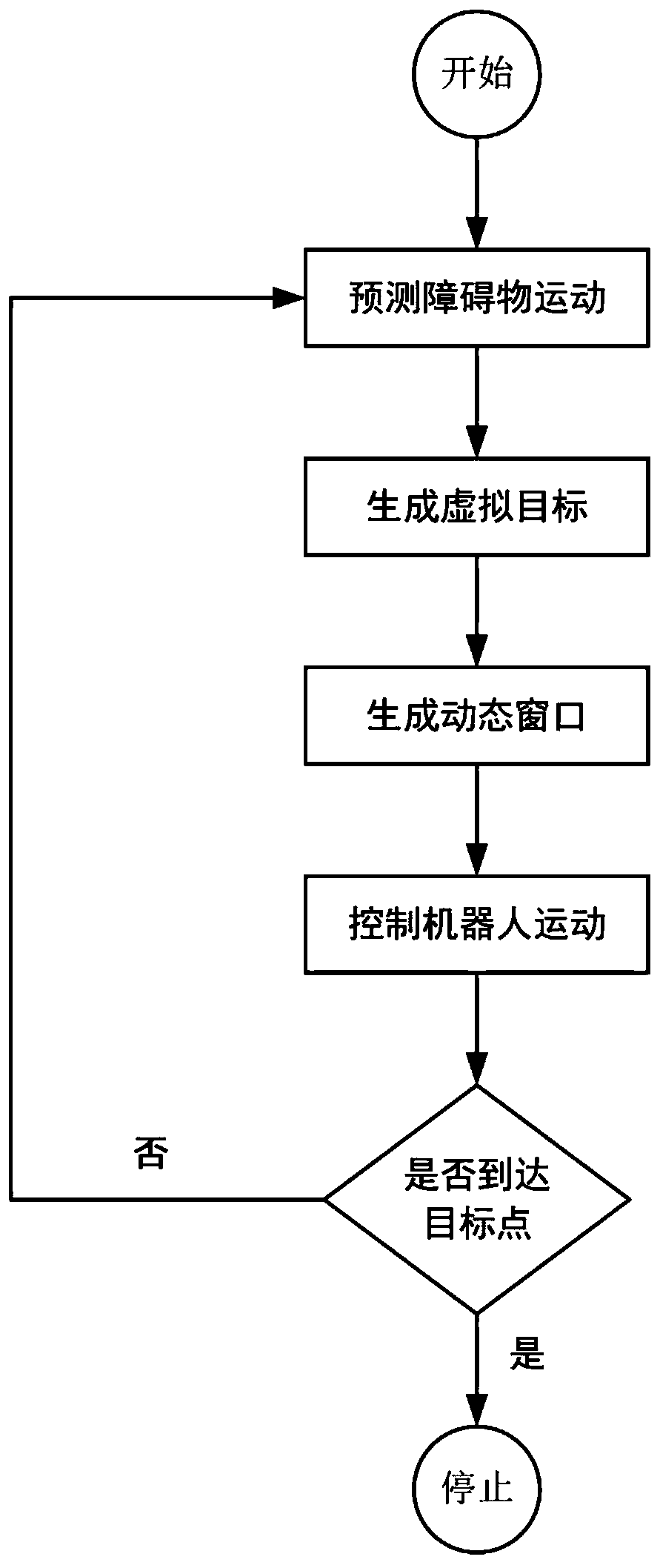
[0051] A method for avoiding obstacles based on dynamic windows and virtual target points of the present invention, the specific process is as follows figure 1 shown, including the following steps:
[0052] The initial position of the robot is [2 1.8], the position of the target point is [5 5.5], the radius r of the robot r =0.3, the initial position of the obstacle [2 2.5], the obstacle moves towards the positive direction of the x-axis and the speed is 0.25m / s, such as Figure 5 shown.
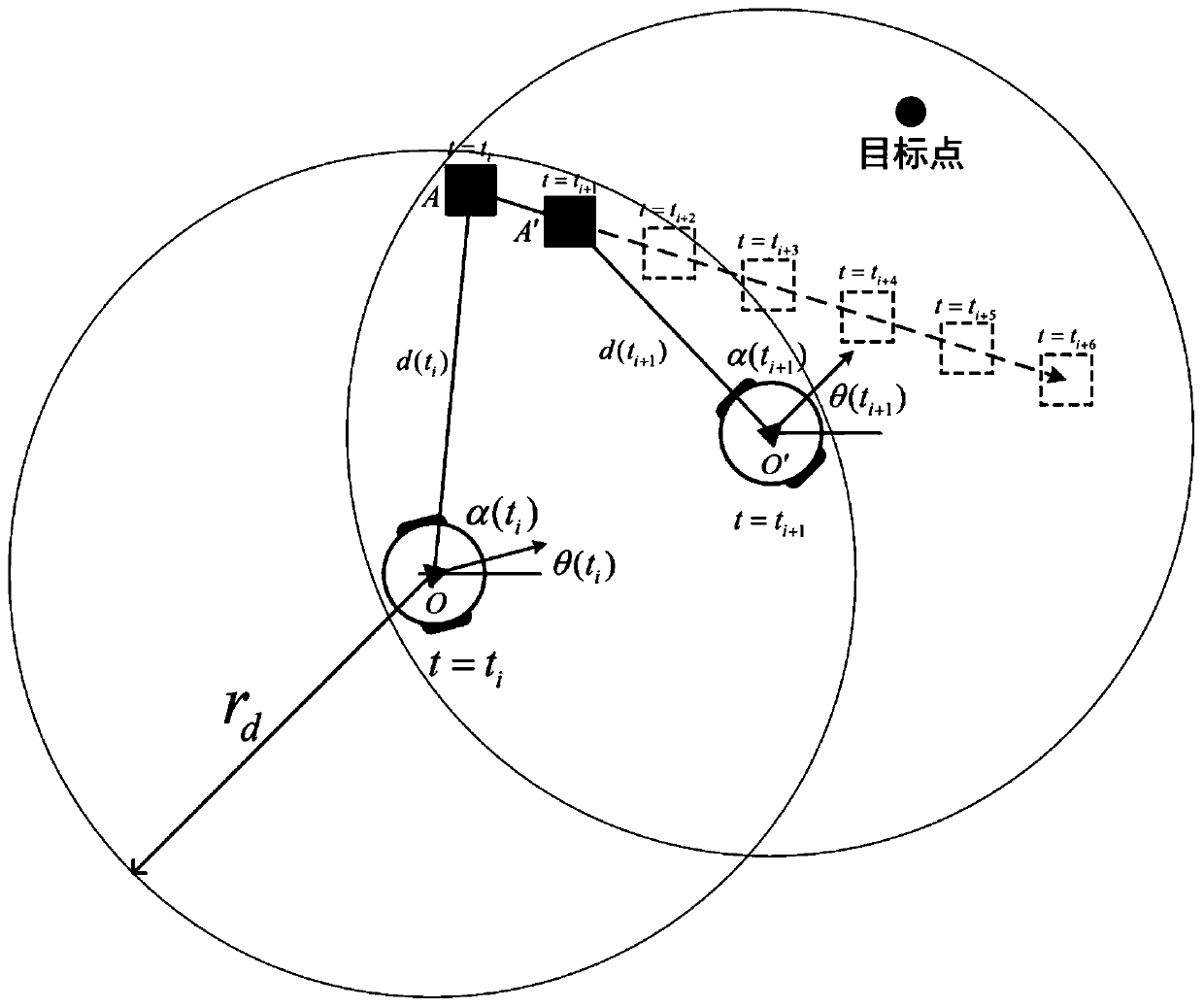
[0053] Step 1: If figure 2 shown. defined at t = t i The coordinates of the robot at the moment are The angle between its advancing direction and the x-axis of the world coordinate system is θ(t i ), the information about obstacles fed back by the sensor of the robot is [α(t i )d(t i )]. record at t=t i The position of the robot at all times is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More