

Human behavior recognition method and system based on multi-mode deep Boltzmann machine
A deep Boltzmann machine and recognition method technology, applied in character and pattern recognition, computer parts, instruments, etc., to achieve the effect of improving accuracy and reducing impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with specific examples.
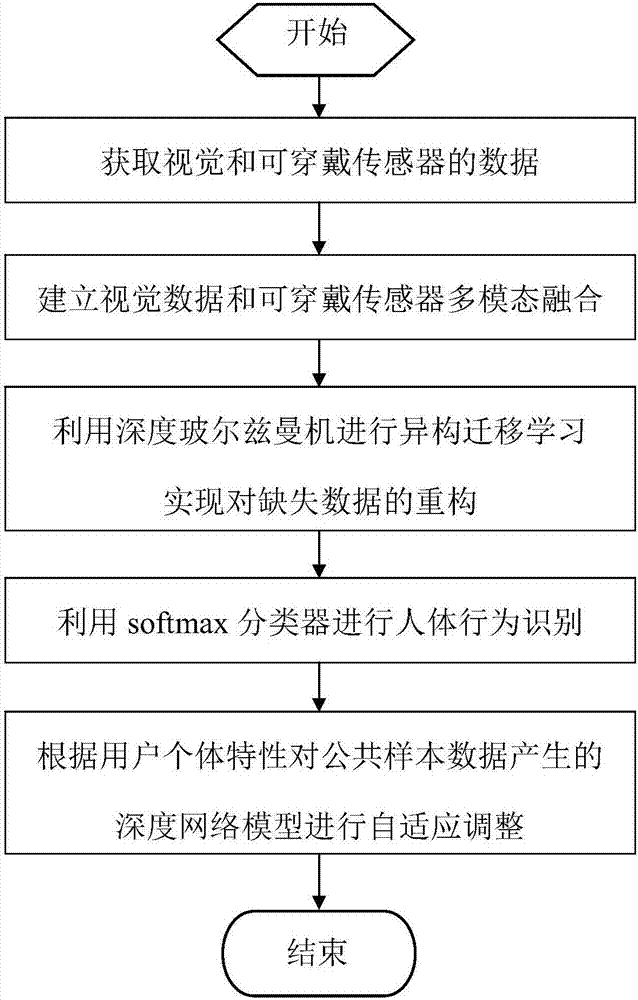
[0061] see figure 1 As shown, the human behavior recognition method based on the multimodal deep Boltzmann machine provided in this embodiment includes the following steps:
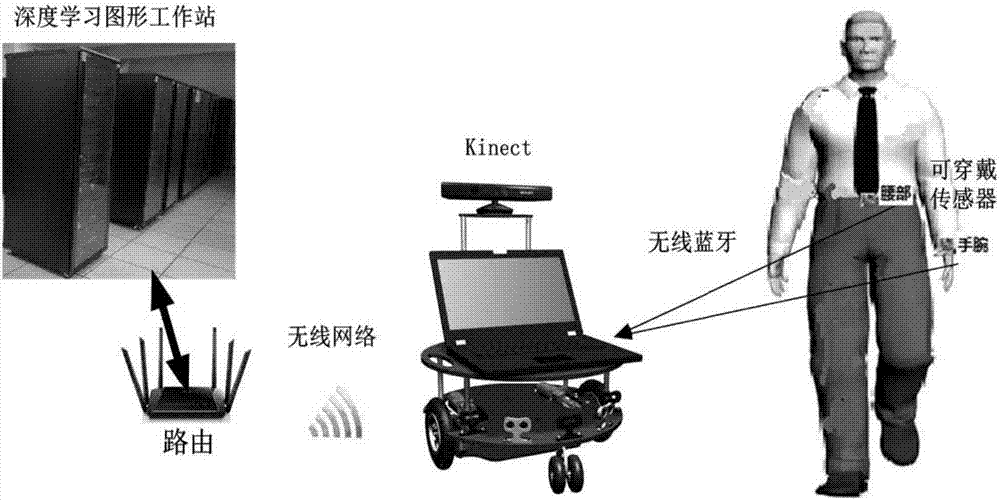
[0062] 1) Establish a robot recognition human behavior system platform to obtain data from vision and wearable sensors;
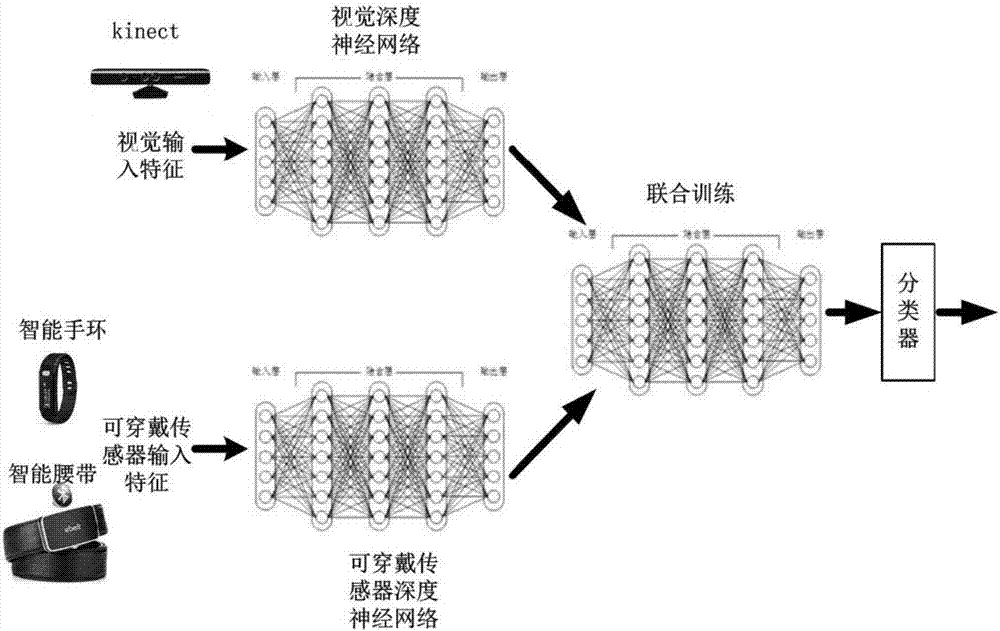
[0063] 2) Establish a multimodal fusion model of visual data and wearable sensors to fuse vision and wearable sensor information;
[0064] 3) Using deep neural network for heterogeneous transfer learning to realize the reconstruction of missing data;
[0065] 4) Use the softmax regression model classifier to classify human behavior;
[0066] 5) Adaptively adjust the deep network model generated from the public sample data according to the individual characteristics of the user.
[0067] see figure 2 Shown, in step 1), described robot recognizes human body behavior system platform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More