

Robot attitude path target track optimization cognitive development method
A target track and robot technology, which is applied in the field of robot attitude path target track optimization simulation, can solve problems that do not involve human and animal neural activity and self-regulation mechanism, and endow robots with other problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] specific implementation plan
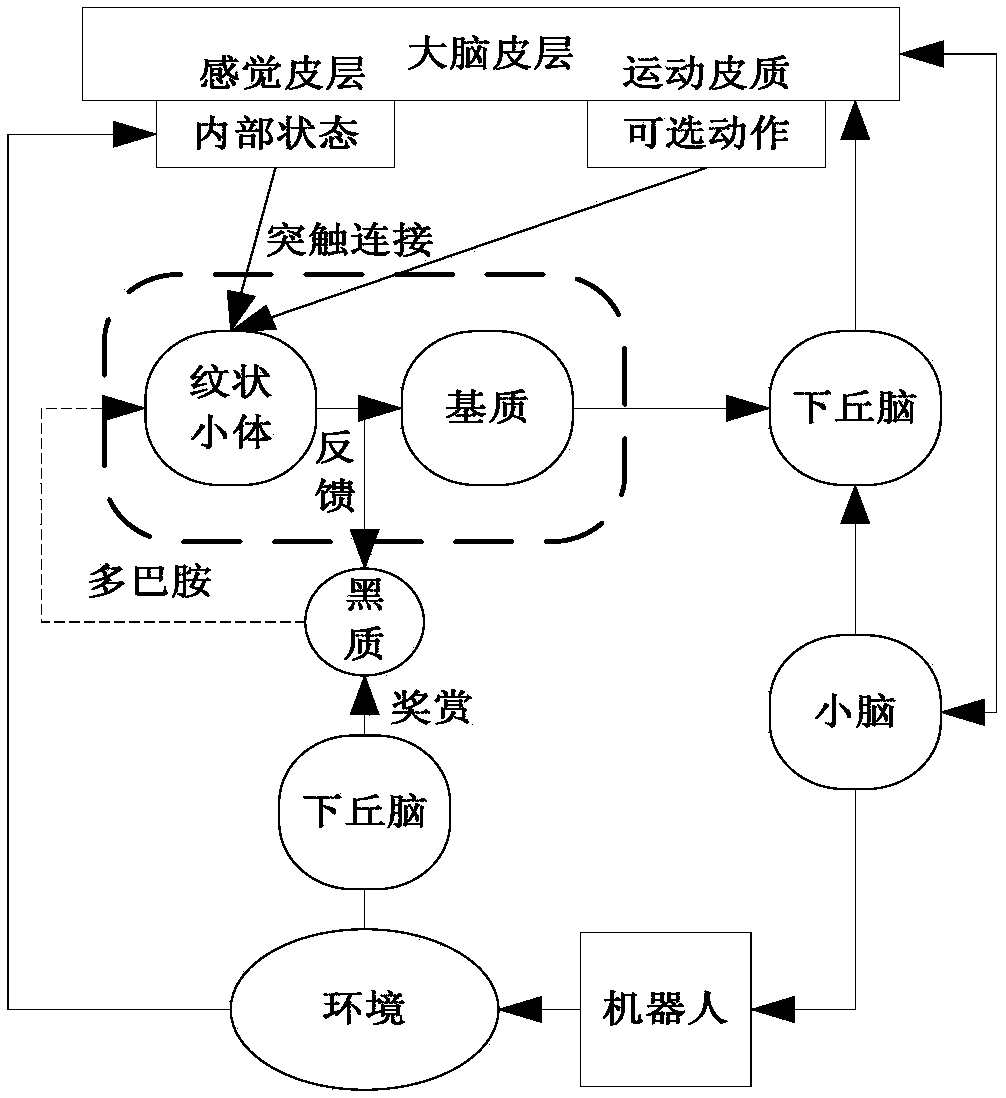
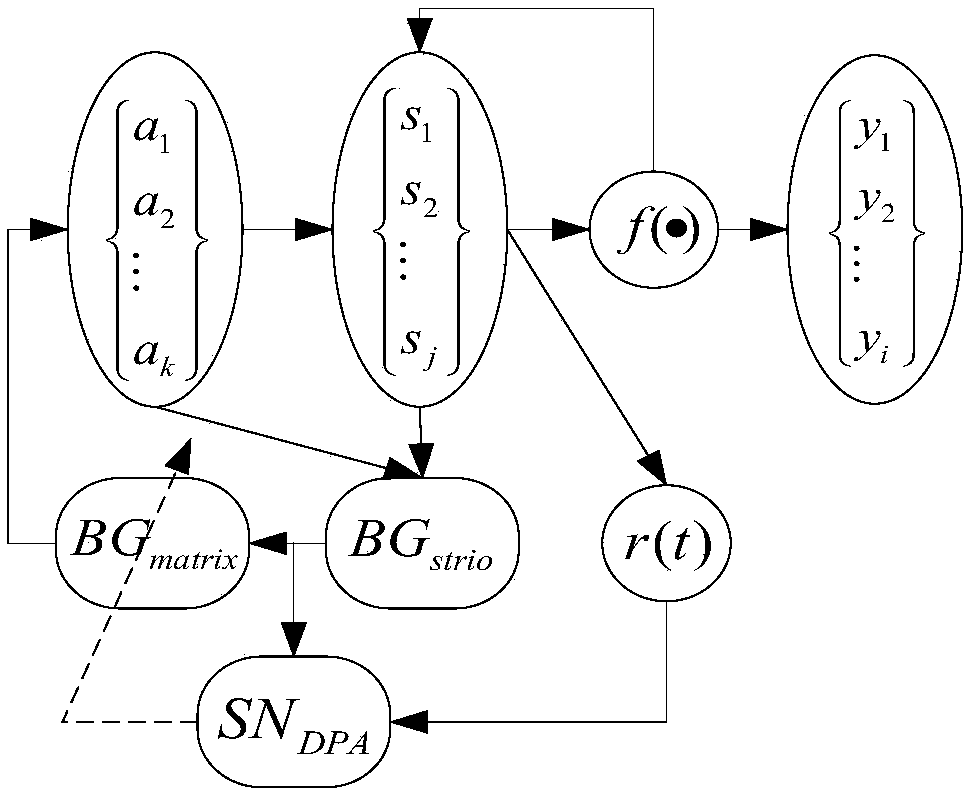
[0047] The present invention aims at learning the continuous behavior of two-wheeled robots, simulating human psychological cognition mechanism and brain nerve movement phenomenon, based on the cognitive development algorithm (CBCLA) thinking activity of human cerebellum-basal ganglia-cerebral cortex circuit, and proposes a Based on the cognitive development method of robots, it is applied to the research of path planning of mobile robots. In an unknown environment, the robot gradually masters the skill of motion balance control through autonomous learning and development, and realizes real-time tracking of the target.
[0048] Based on the above ideas, create a cognitive development method for robot attitude path target track optimization. This method combines the human cognitive development algorithm (CBCLA) thinking based on the cerebellum-basal ganglia-cerebral cortex circuit with the robot. This robot The cognitive development proces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More