

Unmanned aerial vehicle precise landing system and method based on infrared beacon and vision
A UAV and infrared technology, applied in the field of UAV flight, can solve the problems of large amount of calculation, large environmental impact, high target angle requirements, and achieve the effect of strong anti-interference ability, strong compatibility and flexible connection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
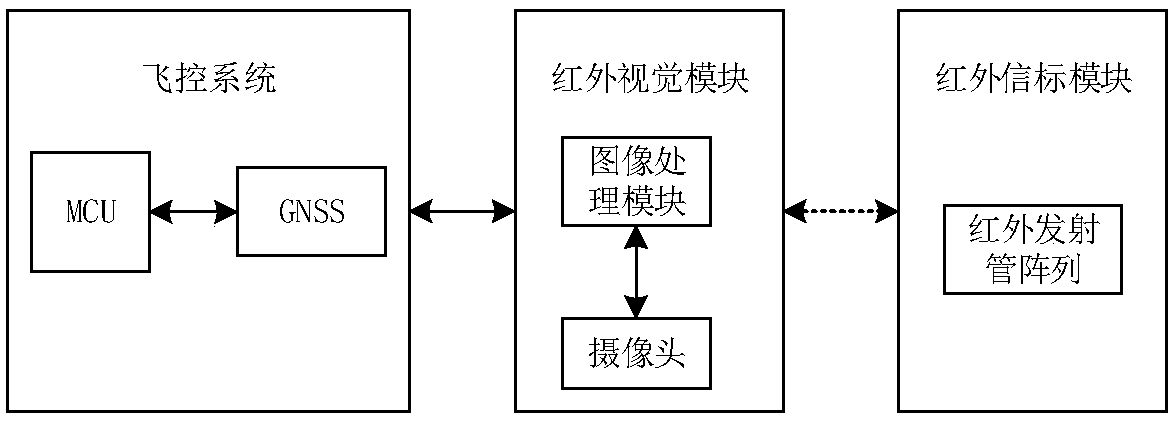
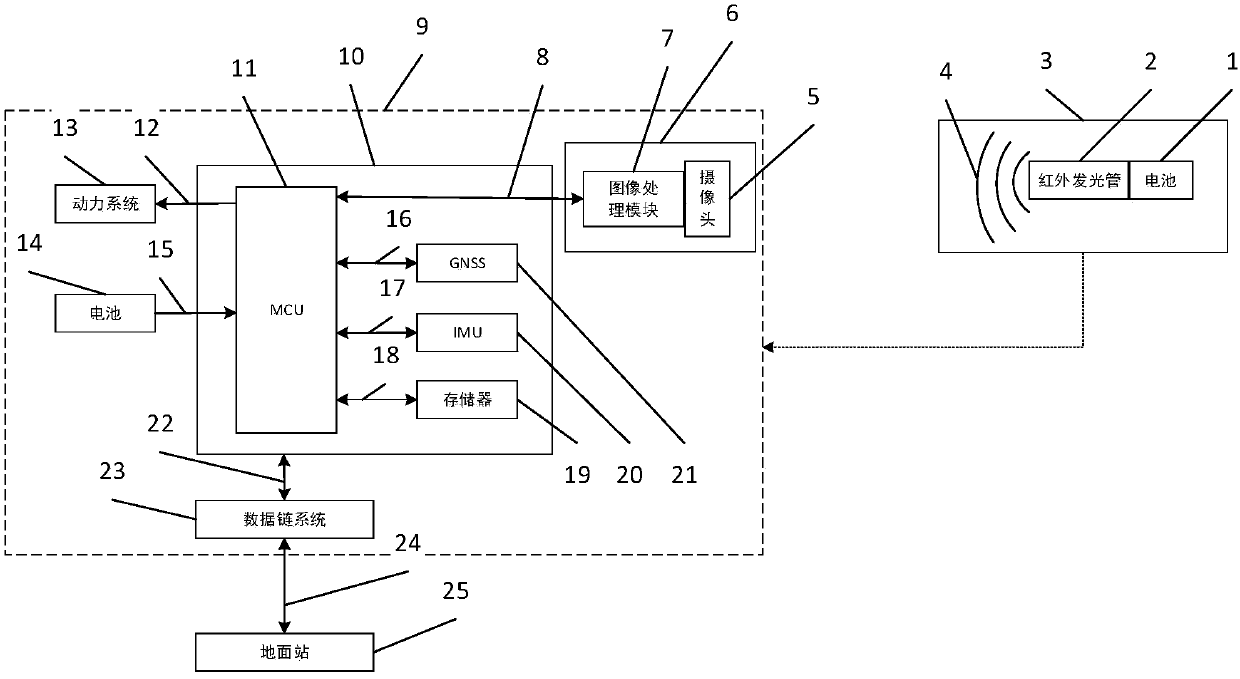
[0067] like figure 1 As shown, an embodiment of the present invention is provided based on an infrared beacon and vision-based UAV precision landing system, which mainly includes an infrared beacon module, a flight control system and an infrared vision module, and a three-axis stabilization system is installed on the UAV. The platform and the flight control system include at least a GNSS positioning module and an MCU, wherein the MCU and the GNSS positioning module are connected through a data interface to obtain the current flight position coordinates of the UAV, so as to cooperate with the flight control system to maintain the stability and stability of the UAV during flight. The orientation remains unchanged; the infrared vision module is installed on the three-axis stabilized gimbal to keep the camera facing vertically downwards, and capture the infrared identification signal (infrared rays) sent by the infrared beacon module to identify the position of the infrared beacon ...
Embodiment 2
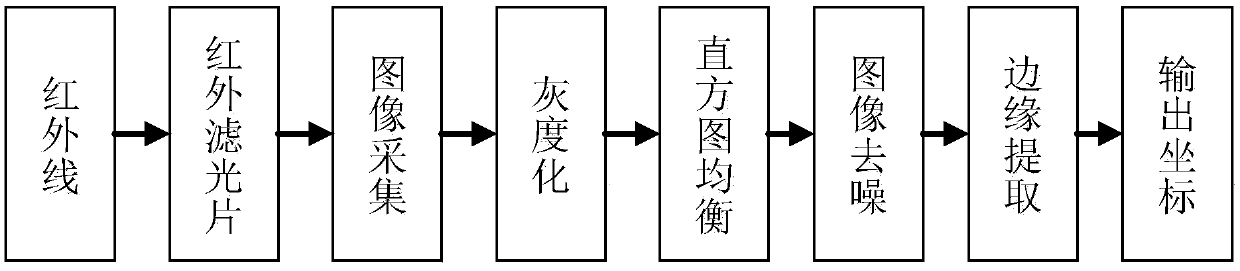
[0090] An embodiment of the present invention provides a precise landing method for UAVs based on infrared beacons and vision. The UAV includes at least an infrared vision module and a flight control system. The flight control system includes at least a GNSS positioning module and an MCU. The vision module includes at least a camera and an image processing module. A three-axis stabilization platform is installed on the UAV, and the camera is installed on the three-axis stabilization platform. The specific steps are as follows:
[0091] Step 1: When the UAV lands, use the GNSS positioning module to estimate whether the current position is above the position of the target landing point;
[0092] Step 2: When the GNSS positioning module estimates that the current position of the UAV is above the position of the target landing point and the height is above 15 meters, the flight control system obtains the estimated position of the target landing point through the GNSS positioning mo...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Launch angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More