

Automatic-obstacle-avoidance and active-trailing intelligent feces collecting and body cleaning robot and working method thereof
A technology of automatic obstacle avoidance and robotics, applied in vehicle rescue, instruments, manipulators, etc., can solve the problems of increasing the difficulty of defecation and defecation of patients, increasing the labor intensity of nursing staff, etc., and achieves easy collection and processing, low cost, and easy adjustment Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
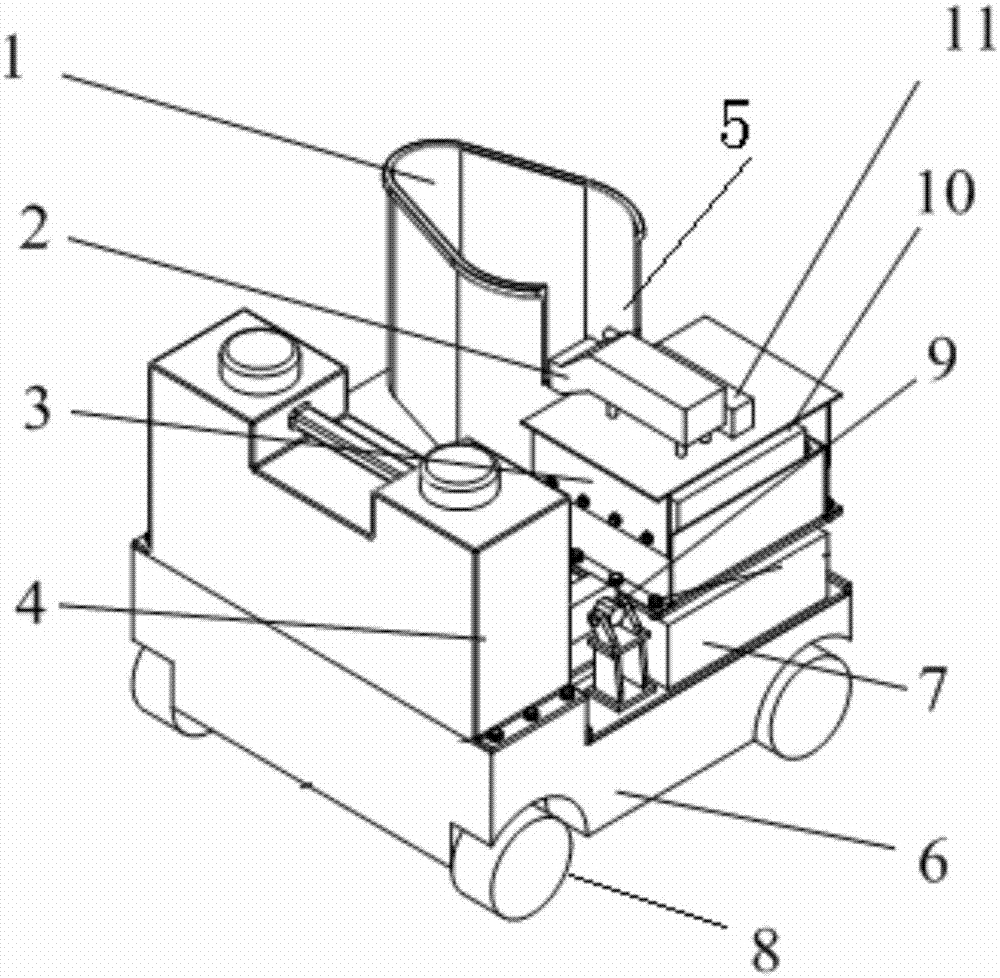
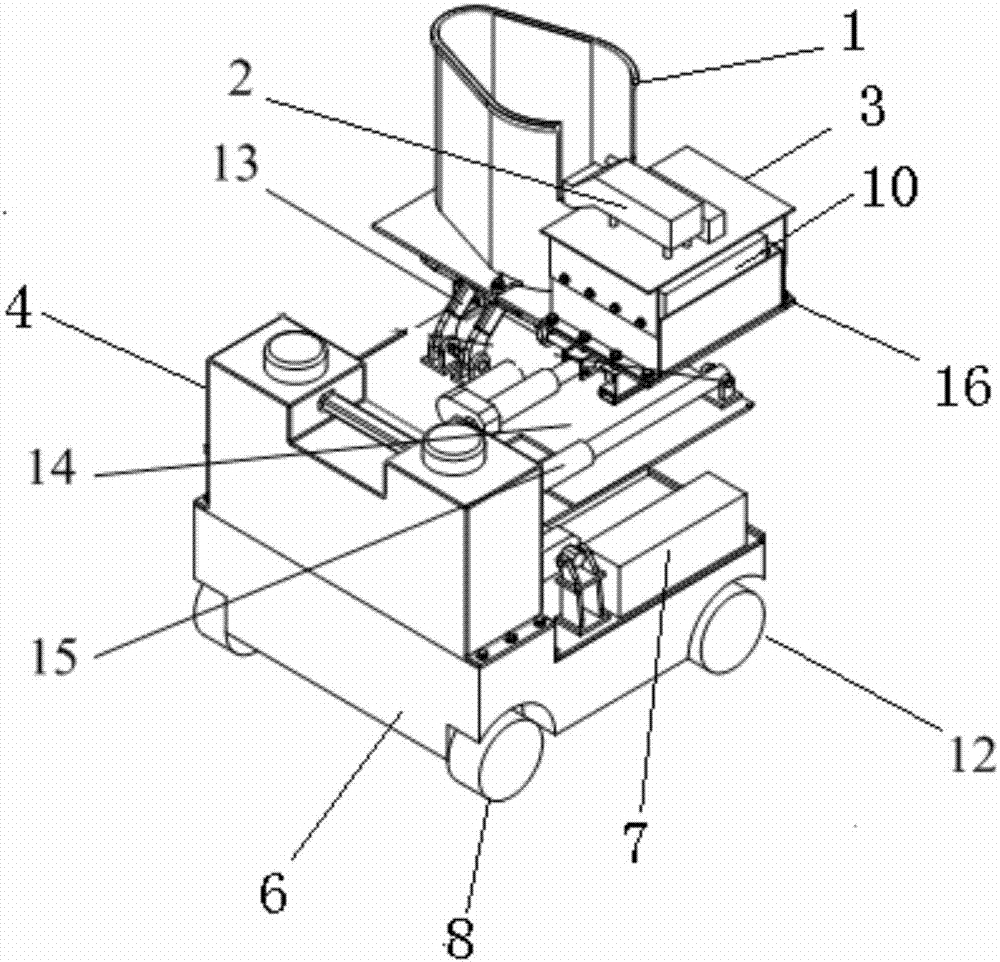
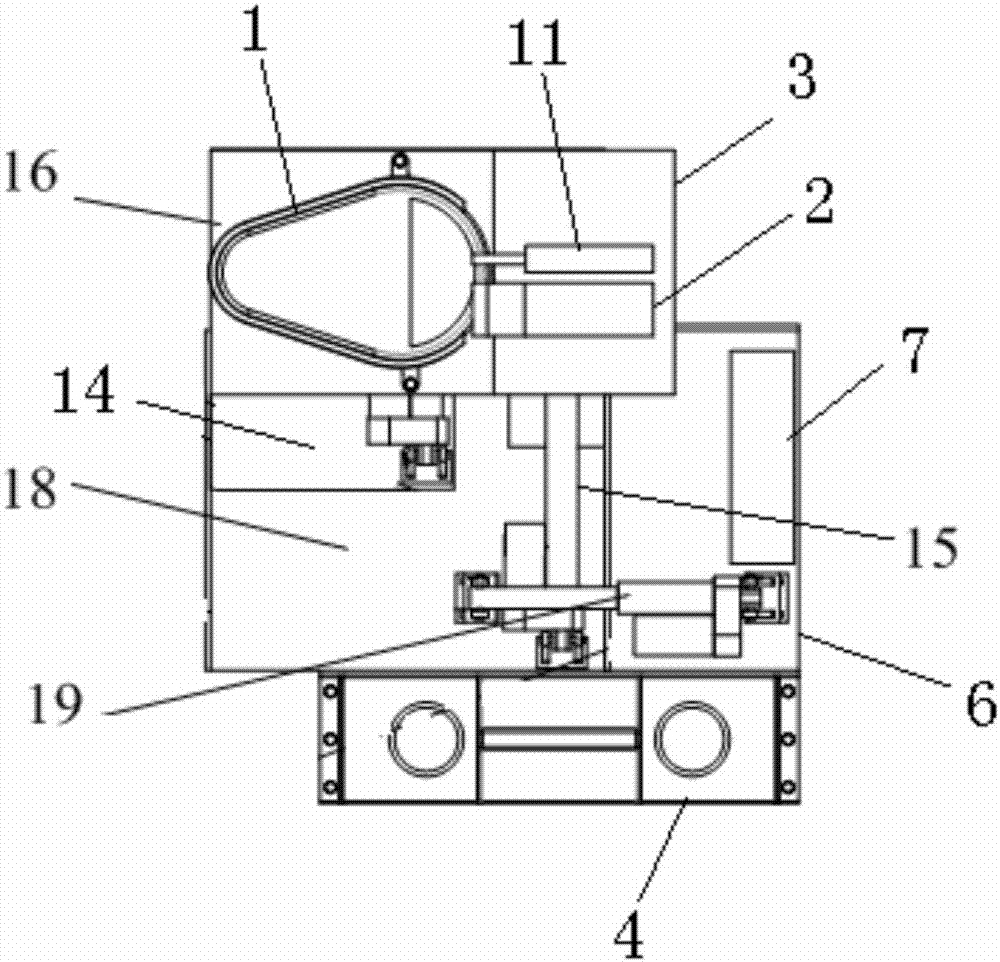
[0030] Example 1 as Figure 1 to Figure 2As shown, the intelligent collection and cleaning robot for automatic obstacle avoidance and active tracking in this embodiment includes a mobile chassis 6, a translation mechanism 9, a lifting mechanism, a toilet 1, a heating water tank 10, and a warm air drying device 2 and sprinkler 11.
[0031] The mobile chassis 6 includes front wheels 12, rear wheels 8, control box 7, steering mechanism placed in the mobile chassis 6, walking drive mechanism, obstacle avoidance sensor, tracking sensor, and a controller placed in the control box 7 , the front wheel 12 cooperates with the steering mechanism to realize the steering function, and the rear wheel 8 cooperates with the walking drive mechanism to realize the moving function. The tracking sensor is used to obtain the position information of the mobile chassis 6 that needs to reach the destination, and transmit it to the controller. After the controller calculates and plans the route, it c...
Embodiment 2
[0041] The working method of the above-mentioned intelligent body cleaning robot includes the following steps:
[0042] A. The tracking sensor of the intelligent toilet cleaning robot 37 obtains the position of the defecation opening of the nursing bed 33, and transmits it to the controller, and the controller calculates and plans the route; the obstacle avoidance sensor obtains the location of obstacles in the planned route The location information is sent to the controller, which calculates and corrects the planned route.
[0043] B. After the controller determines the planned route, it controls the steering mechanism and the walking drive structure to start, and the steering mechanism and the walking drive structure drive the front wheel 12 and the rear wheel 8 to move so that the intelligent toilet cleaning robot 37 leaves the initial stop position 36 and approaches the destination; At the same time, the obstacle avoidance sensor obtains the location information of unexpec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More