

Driving force control method for whole wheel hub motor driving vehicle
A technology of an in-wheel motor and a control method, which is applied to electric vehicles, control drives, control devices, etc., can solve problems such as reduced practicability and inability of in-wheel motors to achieve good coordinated control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] In order to show the present invention more clearly, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments. In order to avoid obscuring the essence of the present invention, well-known methods, procedures, procedures, components and circuits have not been described in detail.
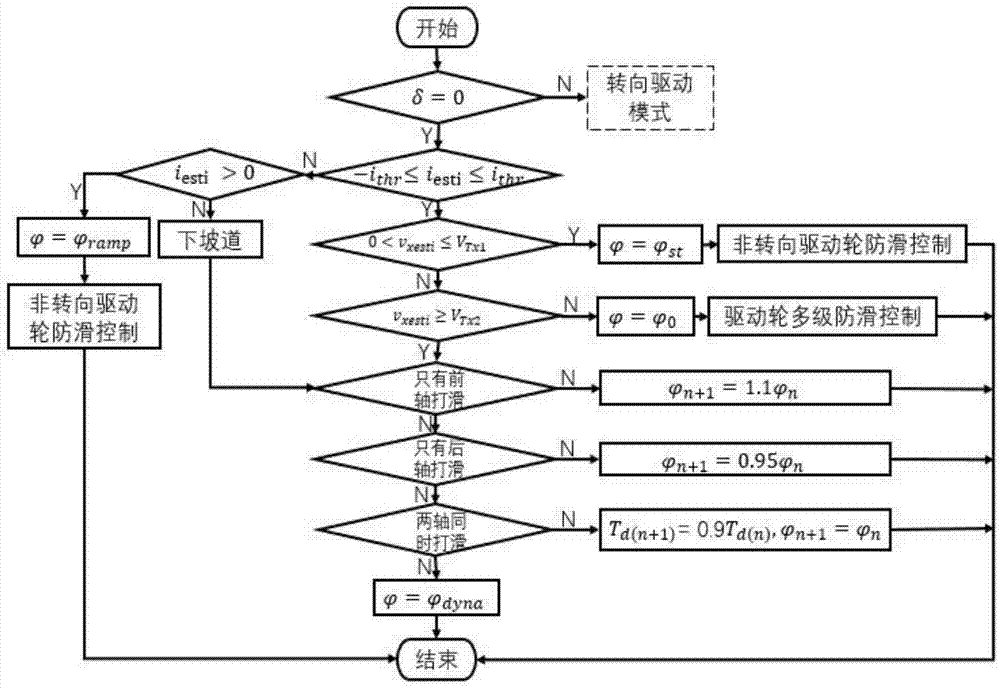
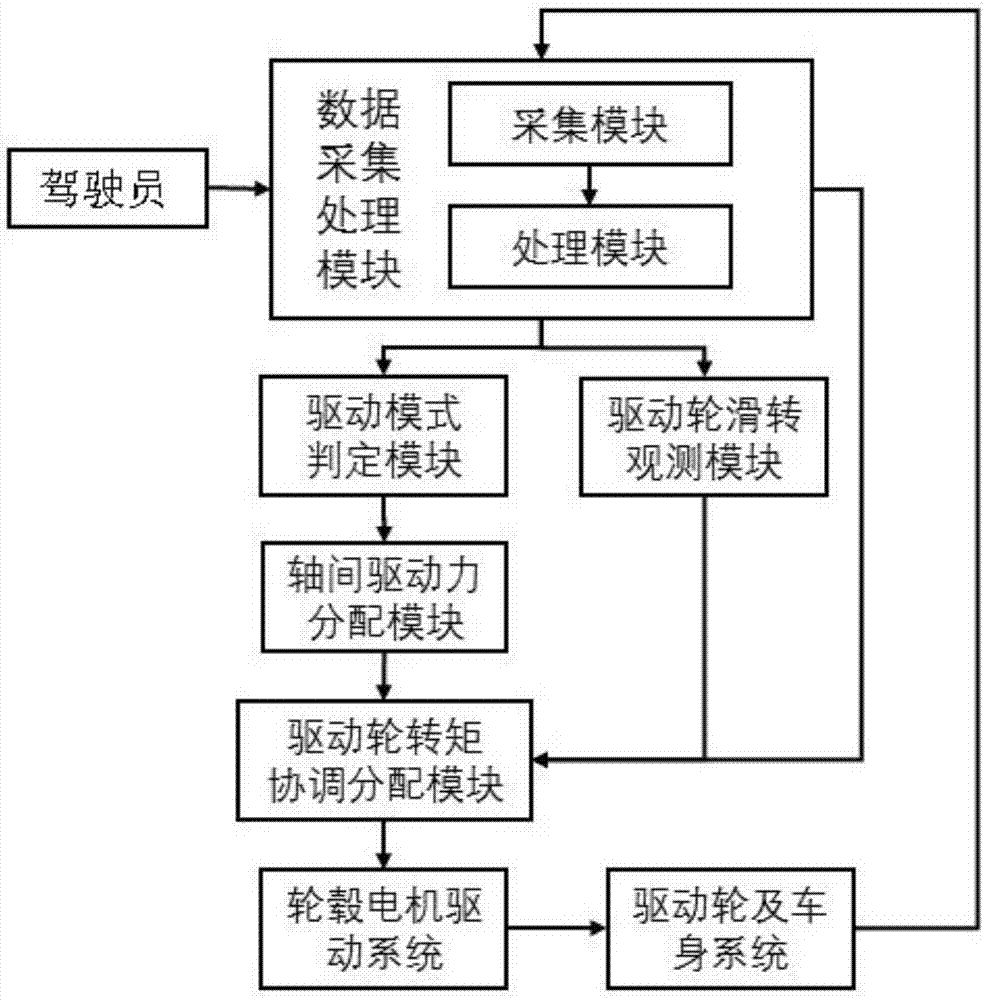
[0093] The present invention proposes a driving force control method for a vehicle driven by an all-wheel hub motor, please refer to image 3 , the control method includes the following steps:
[0094] i) The data acquisition and processing module collects the driver's manipulation information and the vehicle's operating parameters, and preprocesses the collected ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More