

Full-automatic high-altitude glass and window wiping robot for city building external walls
A fully automatic technology for building exterior walls, applied in manipulators, program-controlled manipulators, window cleaning, etc., can solve the problems of jitter, low work efficiency, slow wiping speed, etc., to increase stability, high work efficiency, Fast wipe effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
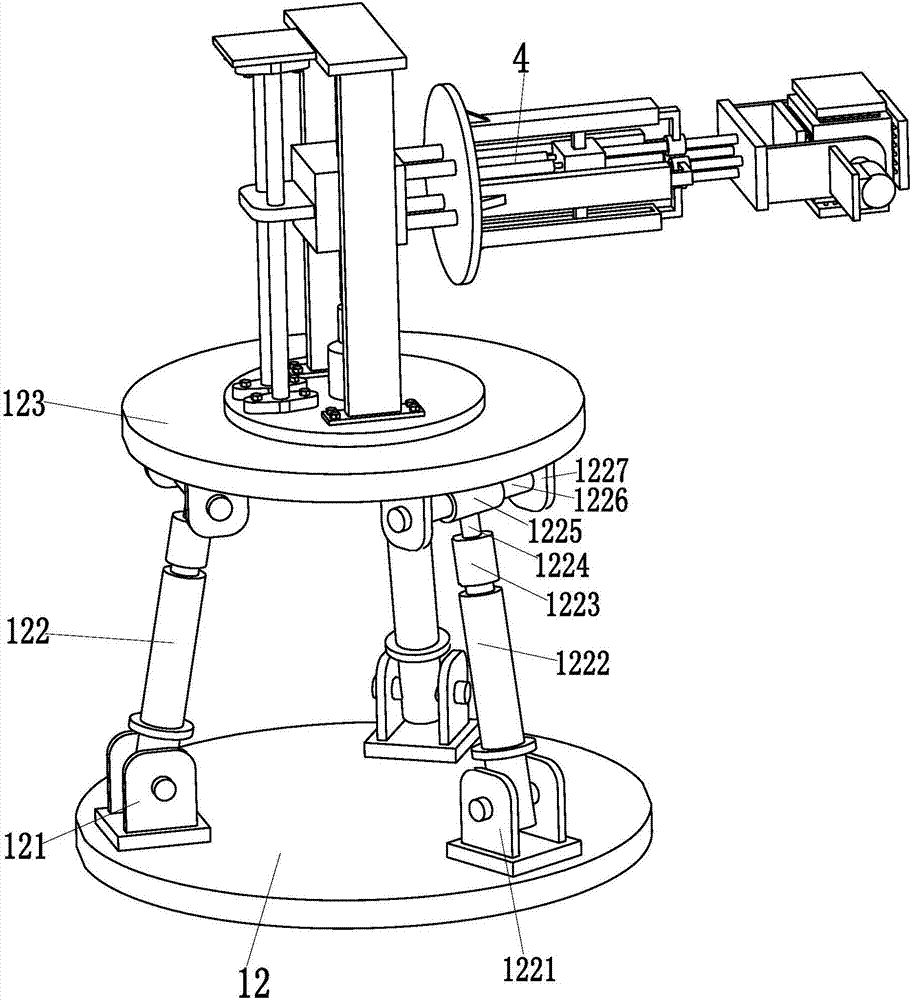
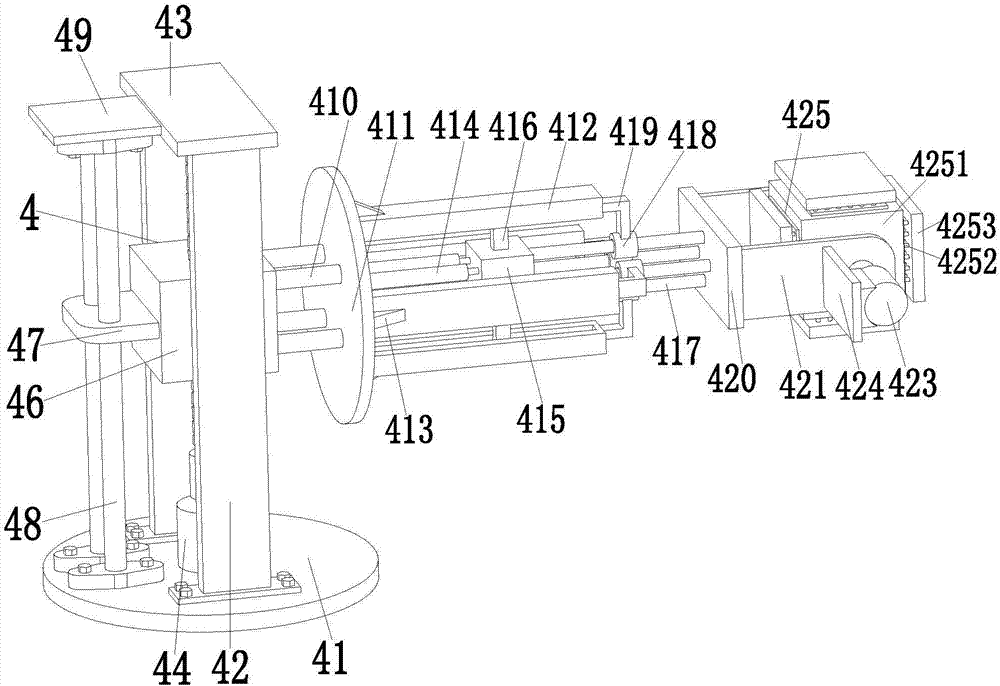
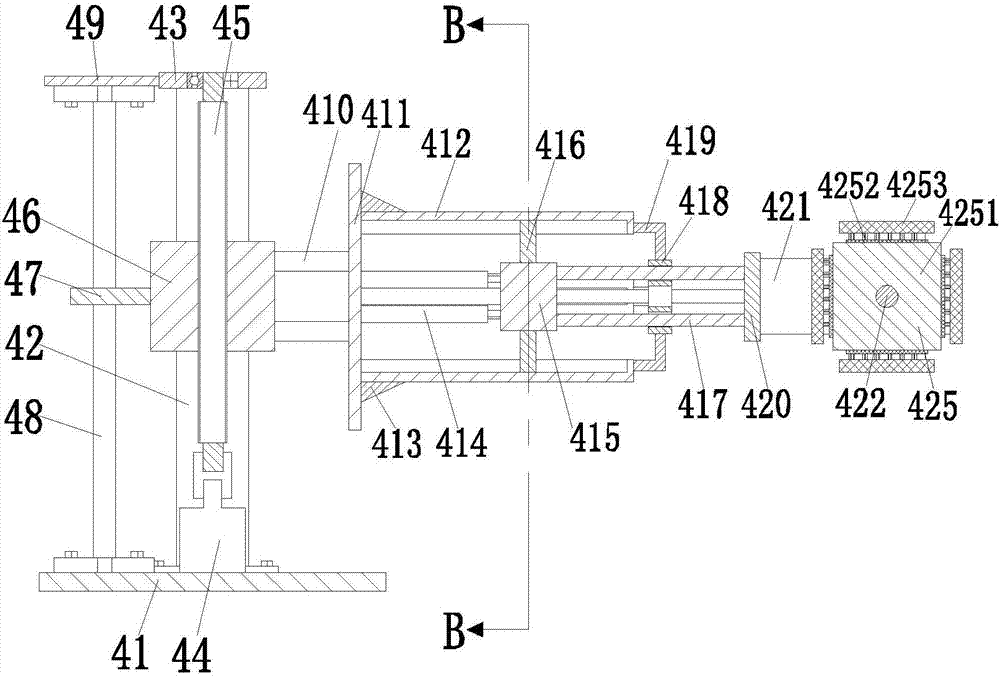
[0019] Such as Figure 1 to Figure 5As shown, a fully automatic window-cleaning manipulator for high-altitude glass on the outer wall of an urban building includes a parallel support mechanism 12. A window-cleaning manipulator 4 is installed in the middle of the upper end surface of the parallel support mechanism 12, and the window-cleaning manipulator 4 realizes the automatic wiping of the present invention. function; the parallel support mechanism 12 includes a fixed platform 121, and the upper end surface of the fixed platform 121 is uniformly installed with three parallel branch chains 122 along the axial direction, and the top ends of the three parallel branch chains 122 are all installed on the moving platform 123; The branch chain 122 inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More