

Unmanned vehicle driving blind area eliminating device and application method thereof
An unmanned vehicle, blind spot technology, applied in signal devices, vehicle parts, transportation and packaging, etc., can solve the problems of blind spot observation, poor operation and control flexibility of inspection equipment, and high energy consumption of equipment operation, so as to improve the accuracy of inspection operations. and reliability, flexibly adjust the operating state, and reduce the energy consumption of equipment operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
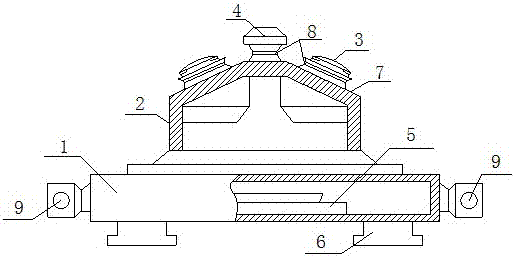
[0019] like figure 1 , 2 As shown in and 3, an unmanned vehicle blind spot elimination device includes a positioning base 1, a detection column 2, a distance measuring device 3, a monitoring camera 4 and a control system 5, and the positioning base 1 is a closed cavity structure with a rectangular cross-section. At least two positioning mechanisms 6 are evenly distributed on the rear surface of the positioning base 1, and are distributed parallel to the lower surface of the vehicle rearview mirror and the horizontal plane through the positioning mechanism 6. The front surface of the positioning base 1 and the detection column 2 are connected to each other and are coaxially distributed. The column 2 is a hollow tubular structure, and its front end surface is evenly distributed with at least four bearing surfaces 7 that are at an angle of 30°-60° with the axis of the detection column 2. There are several distance measuring devices 3, which are evenly distributed around the axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More