

Tracked robot slide parameter detection method
A parameter detection and robotics technology, applied in the field of robotics, can solve problems such as inaccuracy of kinematic models and difficulty in predicting driving trajectories, and achieve the effect of reducing convergence time, ensuring stability, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
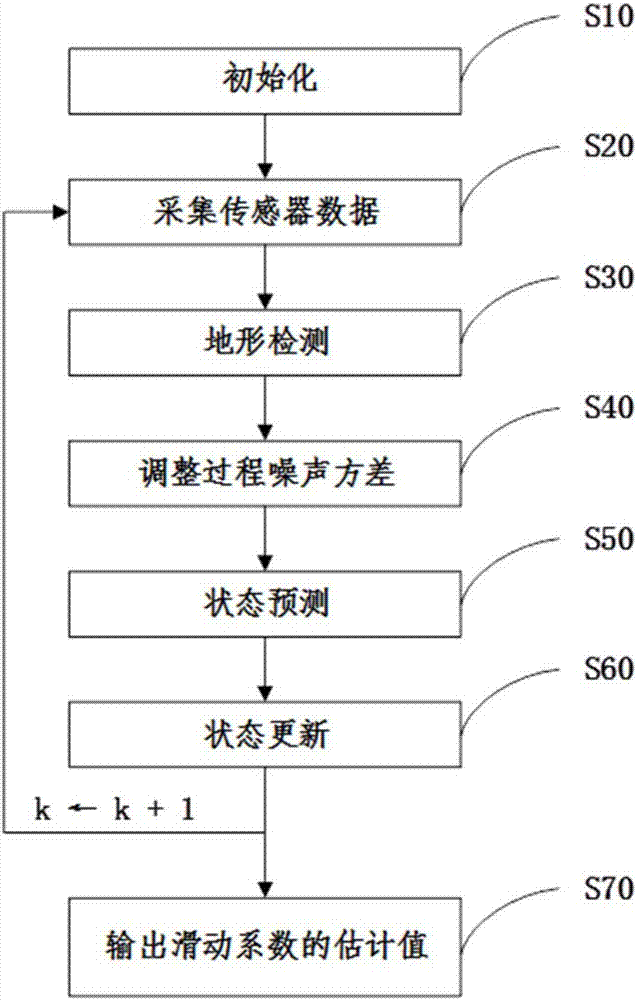
[0021] The invention provides a sliding parameter detection method of a crawler robot. By introducing an optimal estimation theory and a terrain detection algorithm, the estimated value of the sliding parameter of the robot can be obtained. Compared with the existing technology, the advantages are: 1) For the case where the kinematic equation is nonlinear and the observation equation is linear, a colorless transformation is introduced in the state prediction process to ensure the accuracy of the state prediction in the case of strong nonlinearity 2) The introduction of the innovation covariance estimator can ensure the stability of the estimation method when the statistical characteristics of s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More