

Combined simulation method for die-casting mould pick-up manipulator
A co-simulation and manipulator technology, applied in simulators, instruments, control/regulation systems, etc., can solve problems such as inability to achieve manipulator trajectory tracking, large impact on picking accuracy, and inaccuracy, and achieve good trajectory tracking characteristics and fast speed. Effects of Response Features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0031] Embodiment: A method for co-simulating a die-casting mold pick-up manipulator, the method comprising the following steps:
[0032] (1) Establish a simplified model of the manipulator structure;
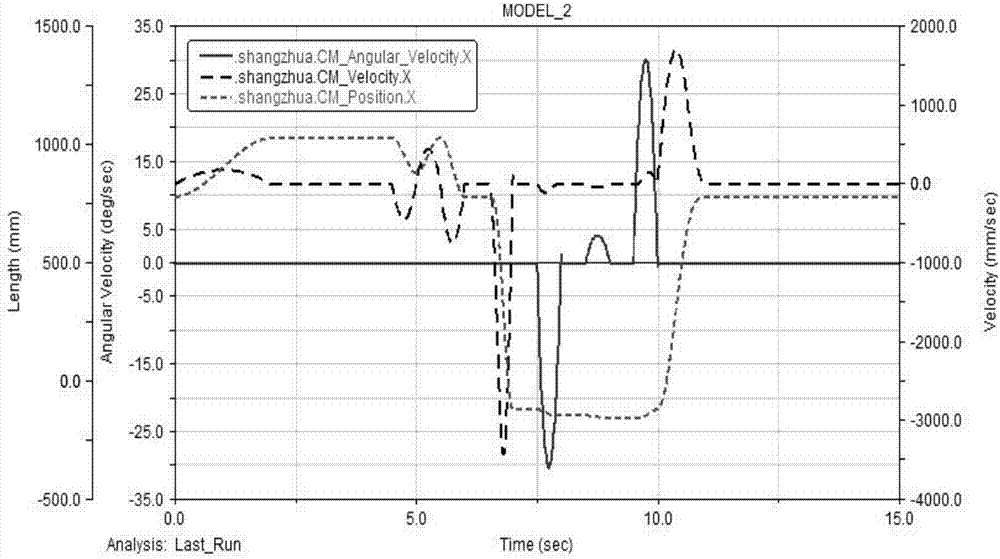
[0033] (2) Mechanical dynamics simulation: define the material properties and moment of inertia properties of each part of the manipulator, set the corresponding kinematic pair and motion drive function of the manipulator, and use Adams to perform mechanical dynamics simulation;
[0034] (3) The simulation results are consistent with expectations, and the control dynamics co-simulation is carried out;
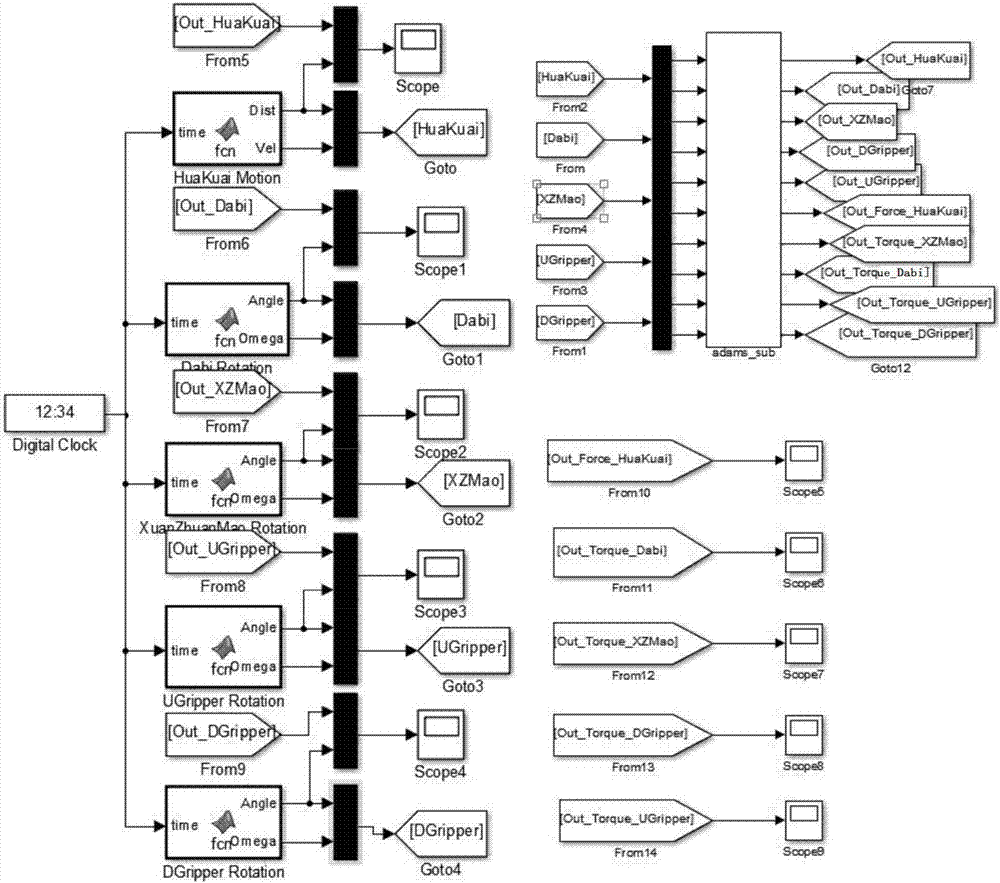
[0035] (4) Import the dynamic model of the manipulator in Adams into the SIMULINK module of Matlab, and use it as the mechanical sub-model of the control system, and establish a joint simulation model;
[0036] (5) ADAMS establishes the mechanical model of the co-simulation system and adds external loads and constraints, and MATLAB / Simulink establishes the control part of the c...
specific Embodiment
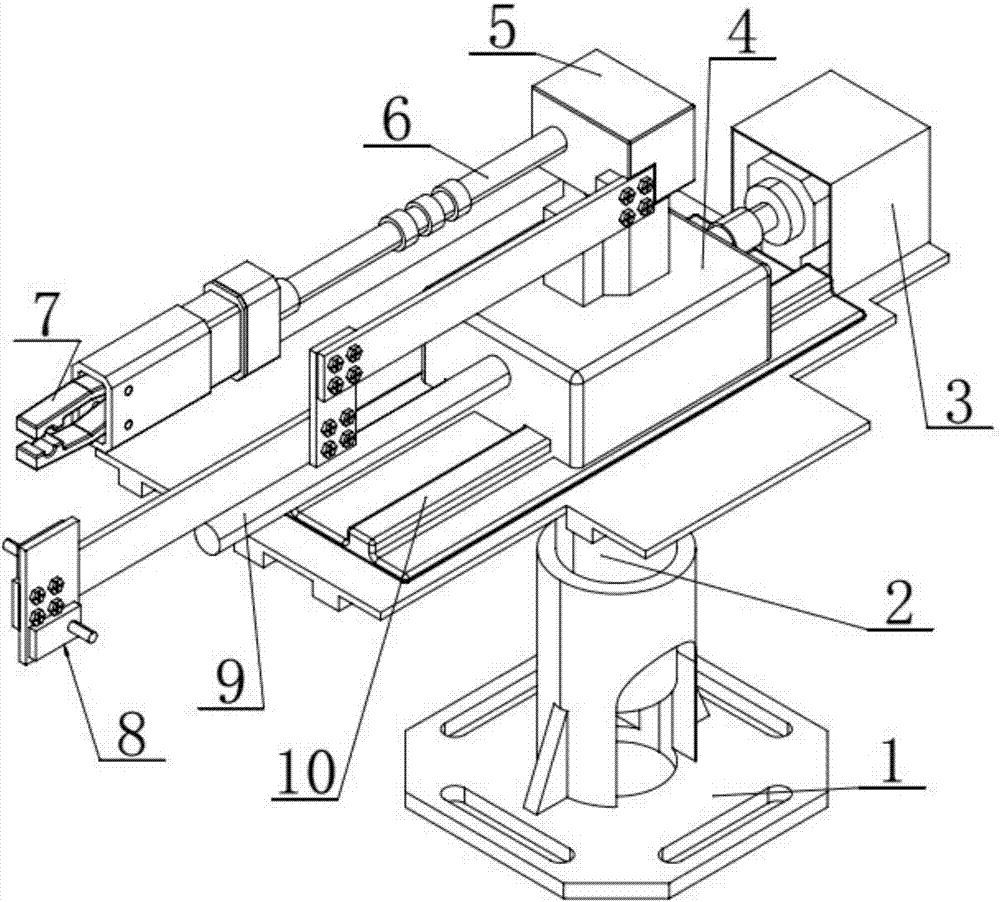
[0042] Specific embodiments: According to the actual environment and working condition requirements of the enterprise in the production process, the overall model of the manipulator is firstly designed. In order to facilitate the simulation analysis in the later stage and improve the simulation efficiency, the designed manipulator model must be simplified to a certain extent. For example, some parts that do not affect the overall movement of the manipulator or have little influence on the manipulator movement can be weakened and ignored. The simplified manipulator model includes a total of five kinematic pairs, four of which are revolving pairs and one is a ball screw pair (in the simulation, it is simplified as a moving pair between the guide rail and the slider), and the simplified model is in Generated in UG, such as figure 1 shown.
[0043] The simplified model retains the main structural dimensions of the manipulator and the design parameters of the main components. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More