

Continuous trajectory control method for 3-degree of freedom pneumatic manipulator
A pneumatic manipulator and trajectory control technology, applied in the field of manipulators, can solve the problems of unstable friction, easy overshoot, phase delay, etc., and achieve the effects of large driving power, high cost performance and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below with reference to the drawings and embodiments.
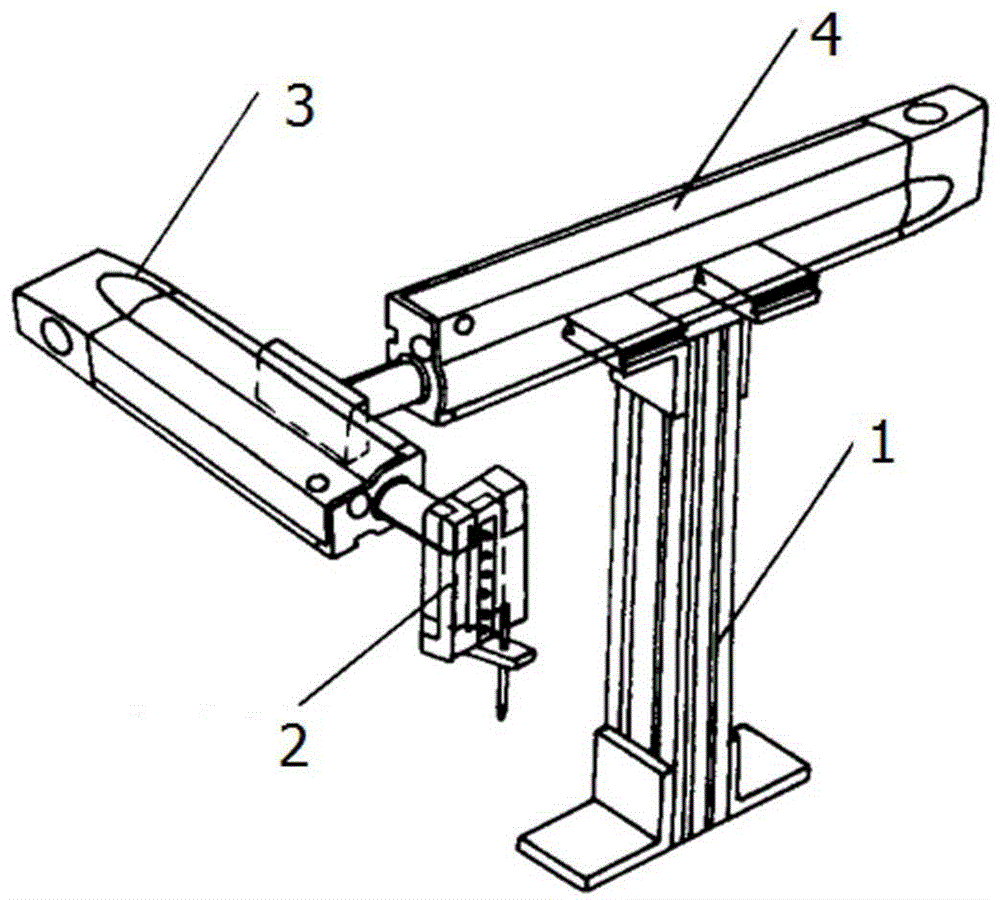
[0016] Such as figure 1 , The 3-degree-of-freedom pneumatic proportional Dongfu manipulator adopts a rectangular coordinate structure. The mechanism is composed of a support, a z-axis module, a y-axis module and a z-axis module. The integrated module with standard mechanical and electronic interfaces is adopted, which can improve The reliability of the system, on the other hand, can quickly form a manipulator system to reduce the cost of pneumatic manipulators.
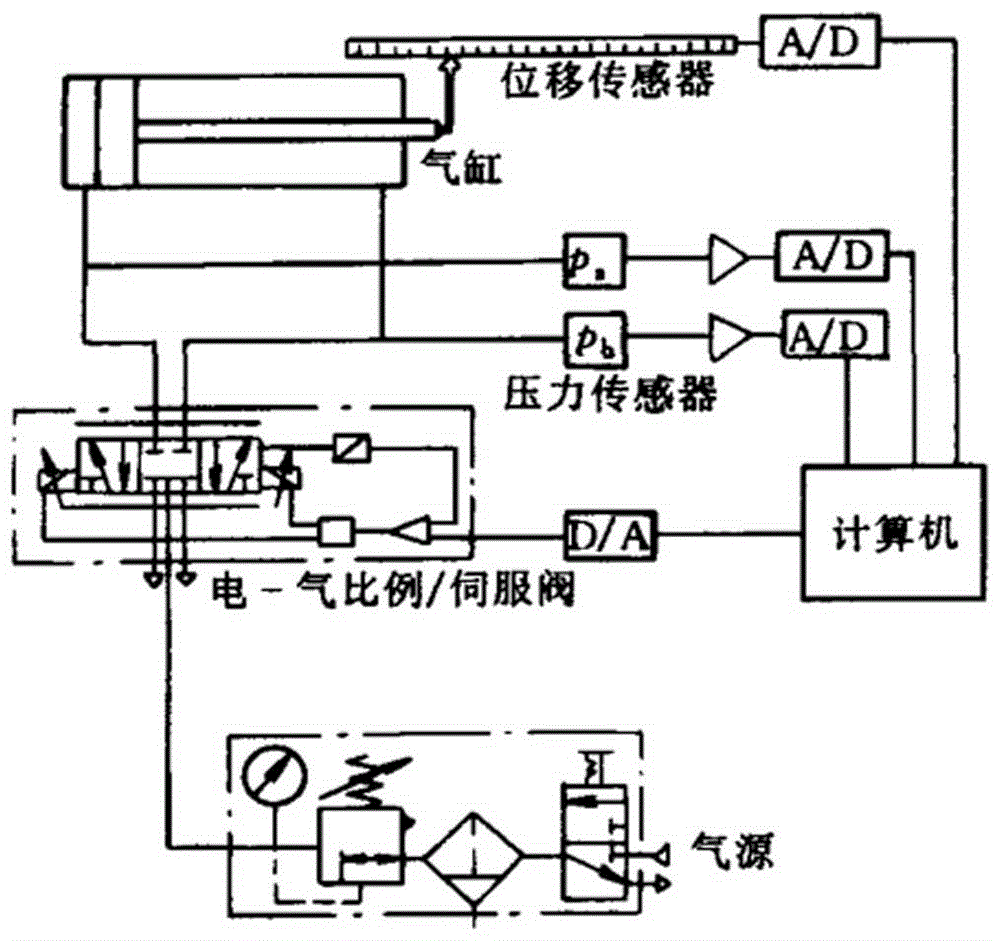
[0017] Such as figure 2 In the control system, the computer detects the pressure of the two chambers of the cylinder and the displacement of the cylinder piston through A / D. The computer passes through a certain algorithm according to the given signal and feedback signal, and outputs the signal through D / A to the electric-pneumatic proportional servo valve to achieve closed-loop control. .
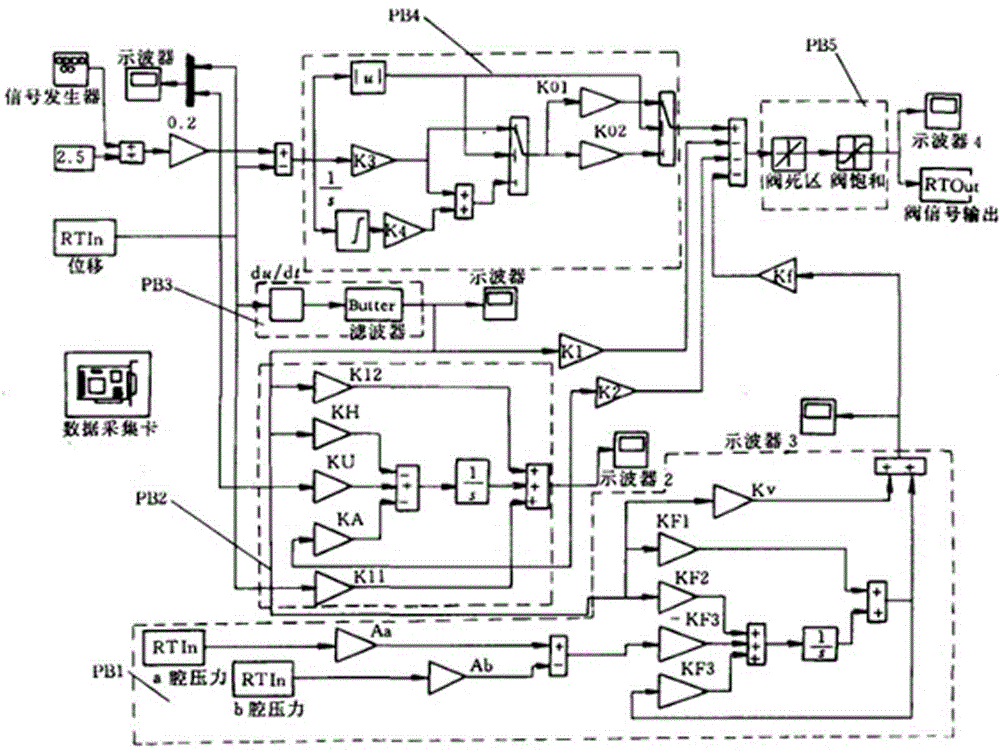
[0018] Such as image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More