

Rehabilitation walking assistance robot device
A technology of robots and rods, applied in the direction of tools, manipulators, program-controlled manipulators that help people to walk, etc., can solve the problems of high road requirements, unstable movement process, low bearing capacity, etc., and achieve good processing and assembly technology. Simple and compact structure and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
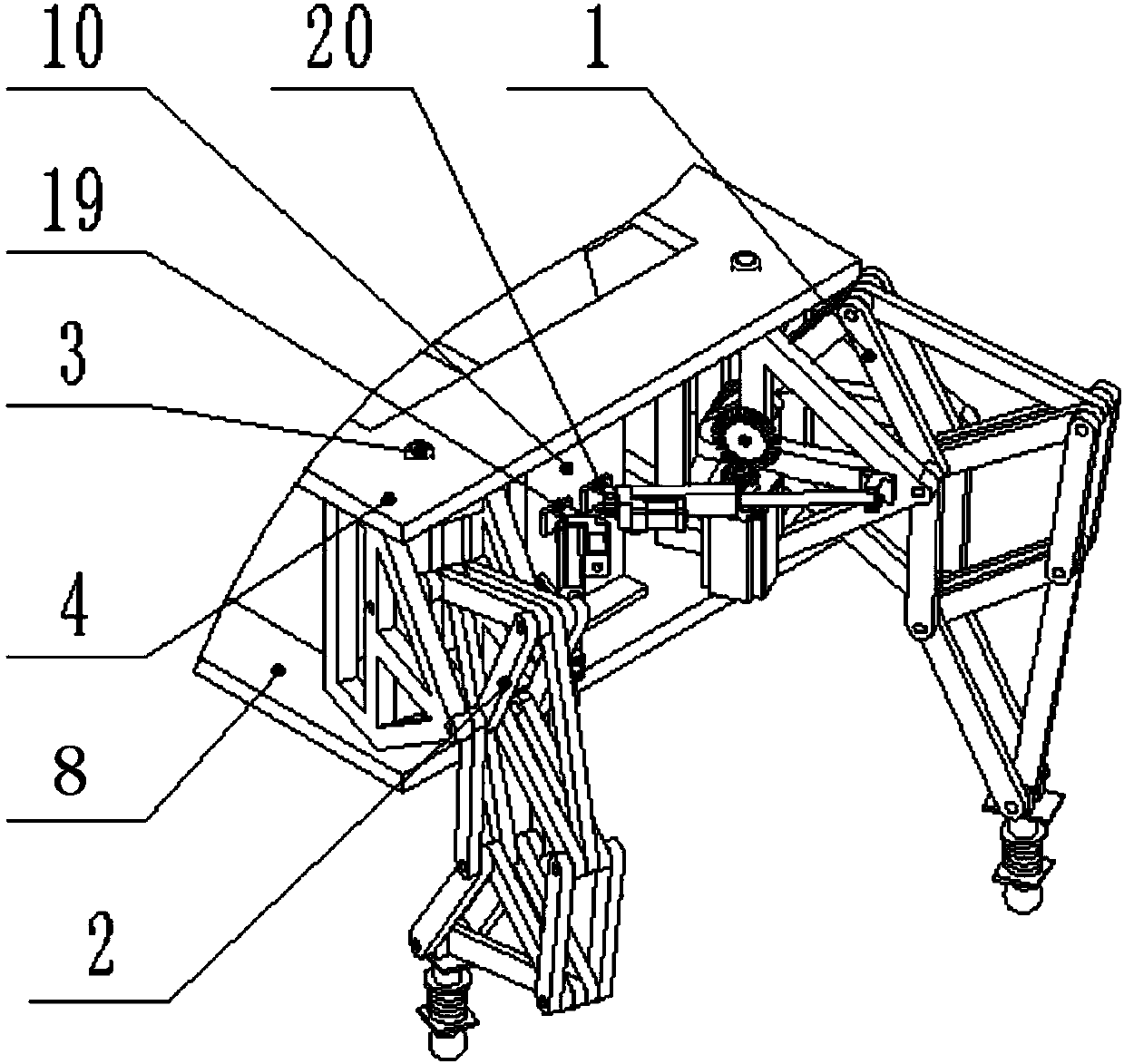
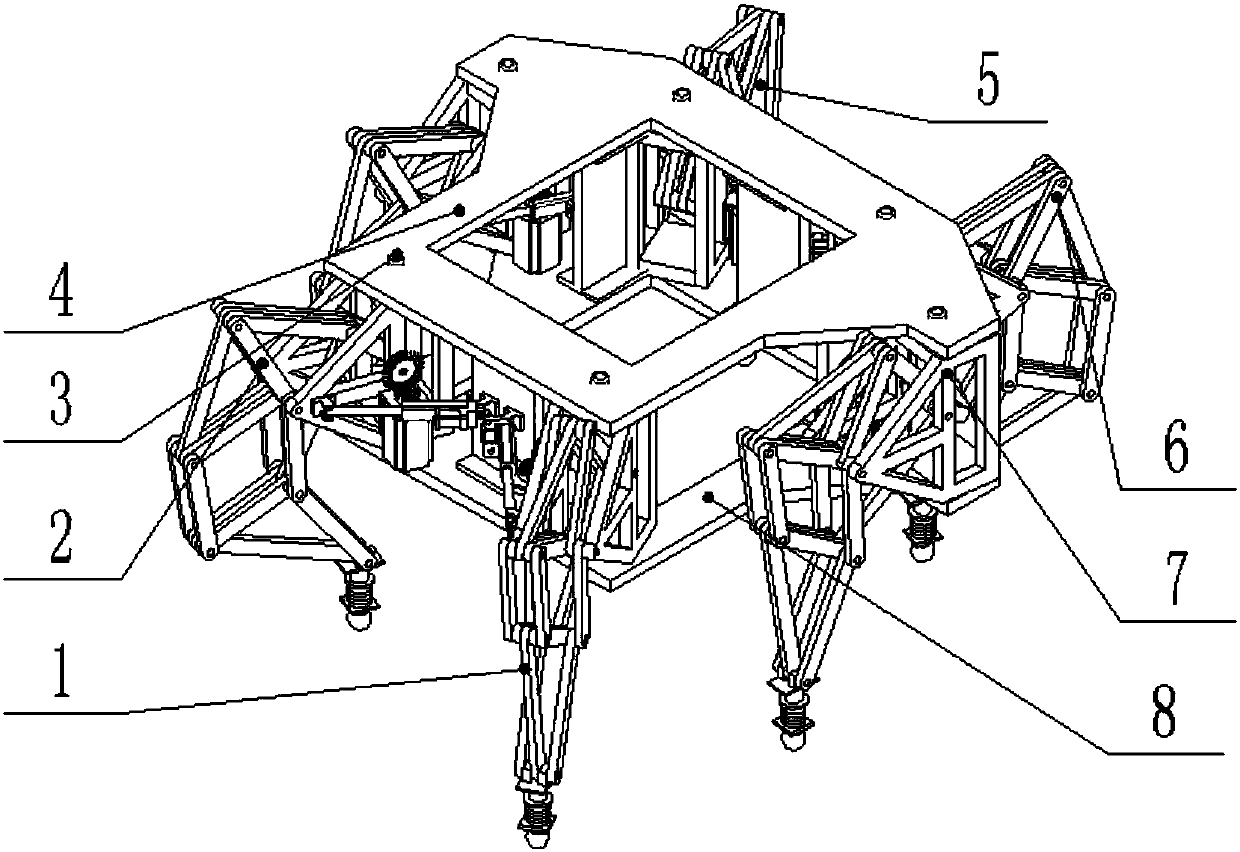
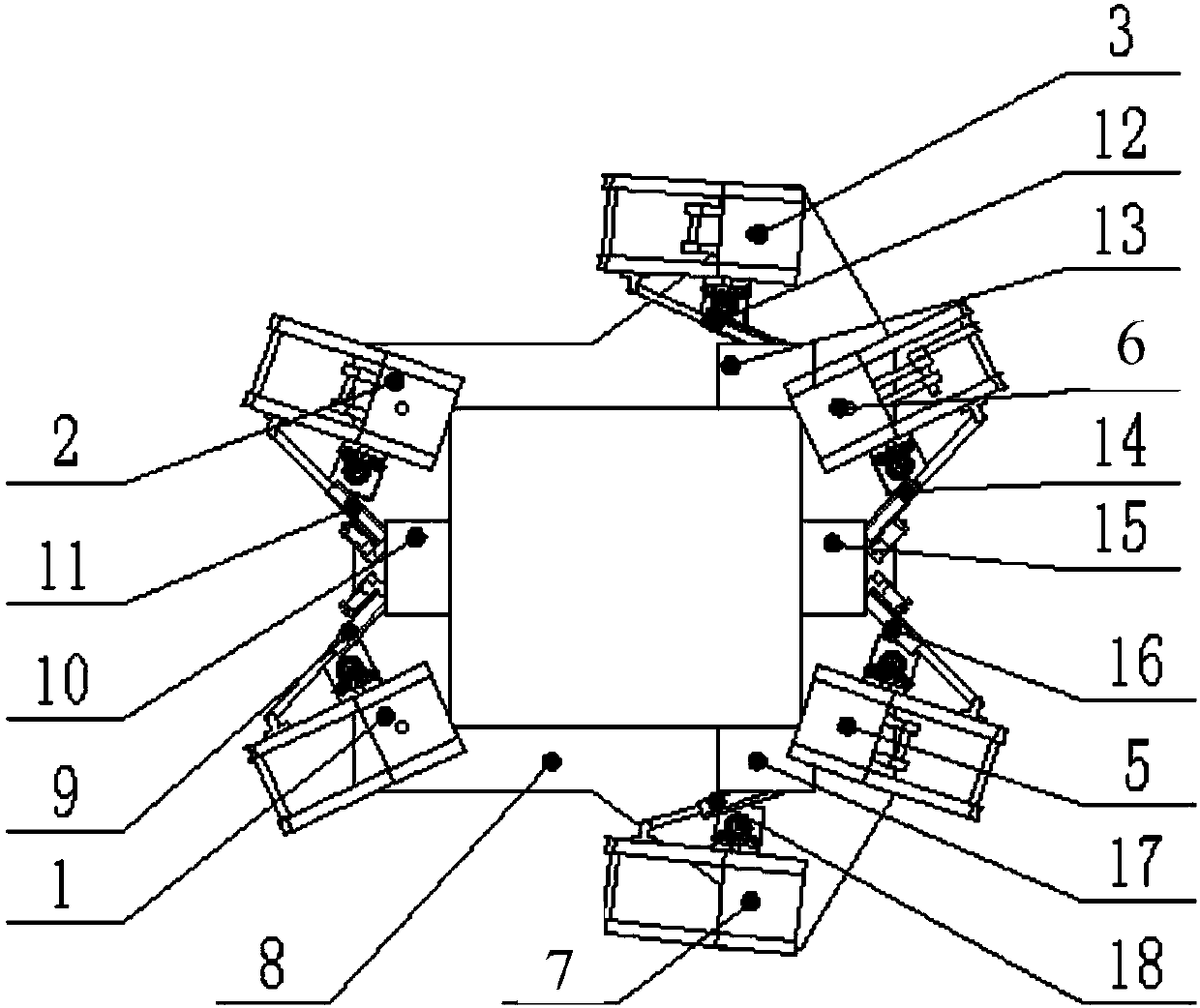
[0022] The present invention will be further described below in conjunction with accompanying drawing:
[0023] like Figure 1~4 As shown, a rehabilitation walking assist robot device, rehabilitation walking assist robot device, comprises upper trunk 4, lower trunk 8, trunk connecting plate, six robot leg shafts 3, six electric push rods and six robot legs, the upper trunk 4 and the lower torso 8 are fixed together through the trunk connecting plate, and the six robot legs are respectively connected to the upper torso 4 and the lower torso 8 through the six robot leg shafts 3; one end of the six electric push rods is connected to the trunk connecting plate On the top, the other ends of the six electric push rods are respectively connected to six robot legs and are used to drive the six robot legs to rotate around the corresponding robot leg shaft 3; the feet of the six robot legs are equipped with feet 21, and the six robot legs pass through the feet 21 Contact with the groun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More