Gravity measuring method based on strapdown inertia/GPS combined auxiliary horizontal angular motion isolation
A technology of gravity measurement and strapdown inertia, which is applied in the direction of measuring device, gravitational field measurement, geophysical measurement, etc., can solve the problems of dynamic response error, gravity measurement error, azimuth axis can not isolate the angular motion of the carrier, etc., to achieve estimation and Effects of compensation, improvement of measurement accuracy, improvement of dynamic environment adaptability and gravity measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0017] A gravity measurement method based on strapdown inertia / GPS combination assisted horizontal angular motion isolation, comprising the following steps:
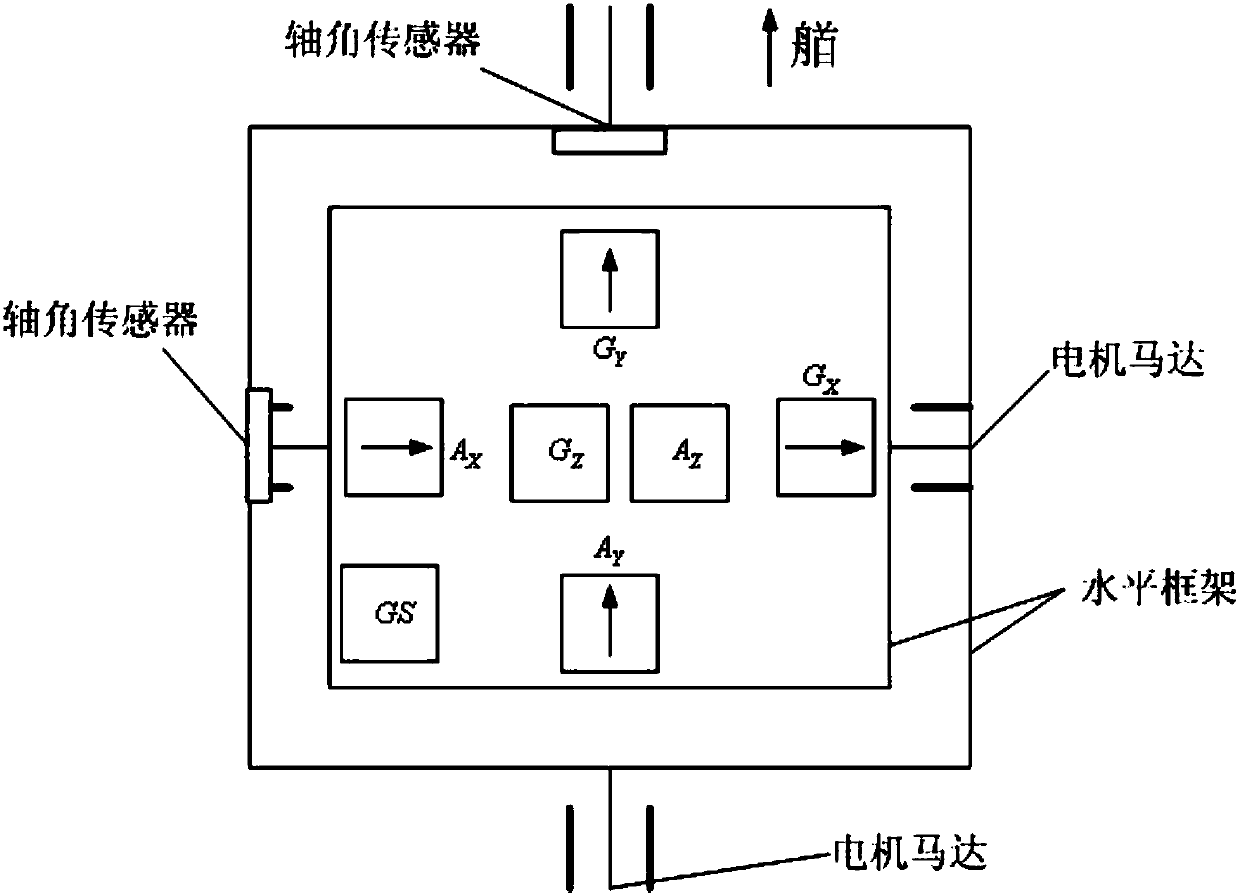
[0018] Step 1. During the actual measurement process, the strapdown inertial information measurement unit (IMU) is basically maintained at a geographically horizontal position through the control of the two-axis stable platform.
[0019] Such as figure 1 As shown, the IMU of the gravimeter uses a dual-axis stable platform to isolate the horizontal angular motion of the carrier. The two horizontal gyros in the IMU are coaxial with the inner and outer ring frames for feedback control of the stable platform. The vertical gyro is responsible for the azimuth motion measurement. The three accelerometers together constitute the inertial navigation control mode of the rate and azimuth platform. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com