

Medical instrument control method and system for assisting in operation
A technology of medical instruments and control methods, which is applied in the field of medical instrument control methods and systems for assisted surgery, and can solve problems such as the inability to accurately and timely control medical instruments to adjust to the positions and/or angles required by doctors, so as to avoid surgical risks Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
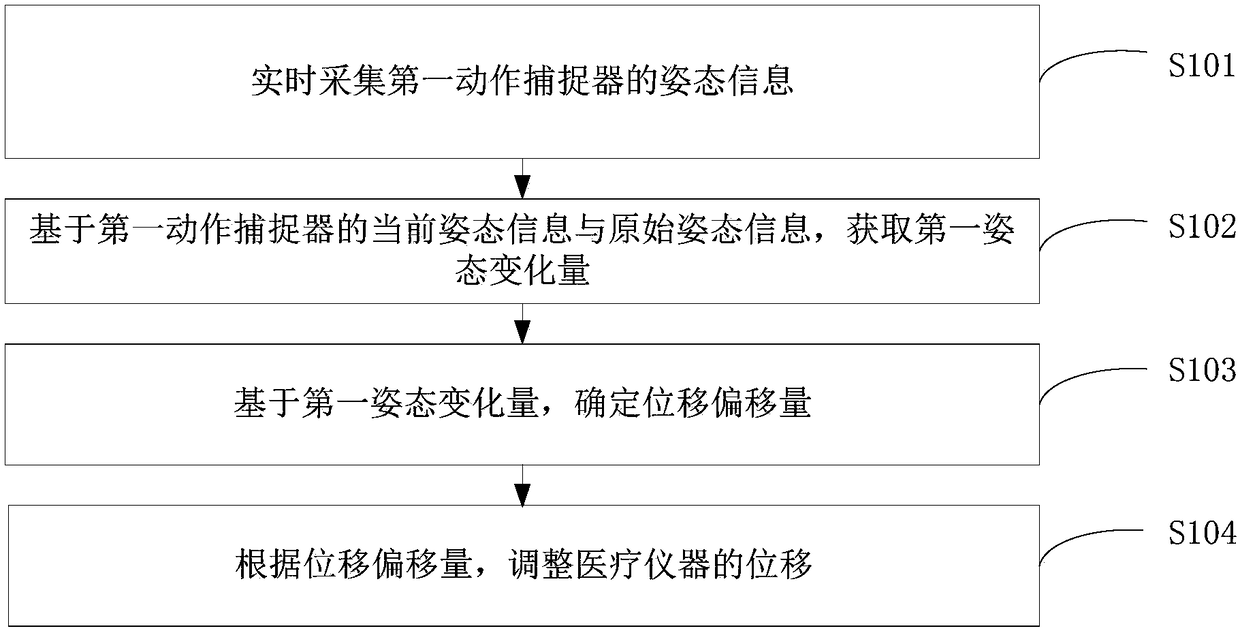
[0026] figure 2 A flow chart of a method for controlling a medical instrument for assisting surgery provided by Embodiment 1 of the present invention is shown. When the doctor's hands are occupied during the operation and only need to adjust the position of the control medical instrument, such as figure 2 As shown, the medical instrument control method of the assisted operation includes:
[0027] Step S101: Collecting pose information of the first motion capture device in real time.
[0028] Preferably, the medical instrument includes an ultrasonic probe, a support rod, a spreader or an endoscope; the first motion capture device includes a stepping sensing component, a rocker control component and a force feedback component. When the first motion capture device is a stepping sensing component, the first motion capture device is used to contact and fit the sole of the doctor's foot, so the first motion capture device moves with the sole of the foot, that is, the first motio...
Embodiment 2
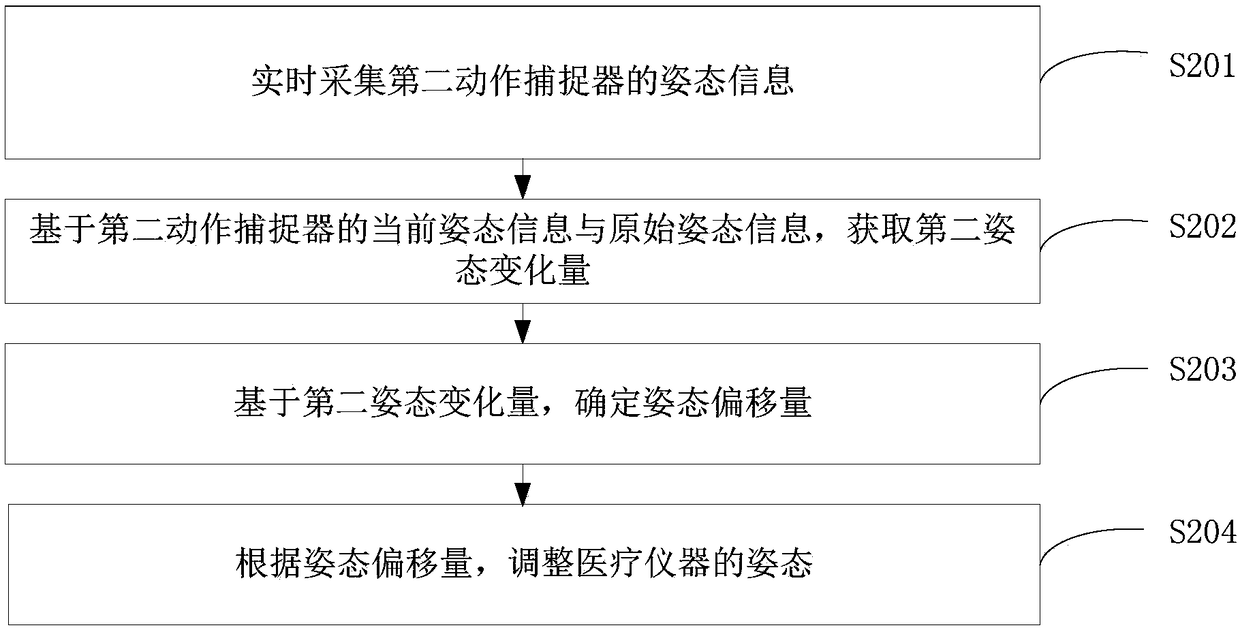
[0045] image 3 A flow chart of a method for controlling a medical instrument for assisting surgery provided by Embodiment 2 of the present invention is shown. When the doctor's hands are occupied during the operation and only need to adjust the posture of controlling the medical instrument, such as image 3 As shown, the medical instrument control method of the assisted operation includes:
[0046] Step S201: Collecting pose information of the second motion capture device in real time.
[0047] Preferably, the medical instrument includes an ultrasonic probe, a support rod, a spreader or an endoscope; the second motion capture device includes a stepping sensing component, a rocker control component and a force feedback component. When the second motion capture device is a stepping sensing component, the second motion capture device is used to contact and fit the sole of the doctor's foot, so the second motion capture device moves with the sole of the foot, that is, the secon...
Embodiment 3
[0065] Figure 4 A flow chart of a method for controlling a medical instrument for assisting surgery provided by Embodiment 3 of the present invention is shown. When the doctor's hands are occupied during the operation and the position and posture of the medical instrument need to be adjusted, such as Figure 4 As shown, the medical instrument control method of the assisted operation includes:
[0066] Step S301: Collect gesture information of the first motion capture device and the second motion capture device in real time.
[0067] Preferably, the medical instrument includes an ultrasonic probe, a support rod, a spreader or an endoscope; the first motion capture device and the second motion capture device include a stepping sensing component, a rocker control component and a force feedback component.
[0068] The stepping sensing part is used to sense the posture of the sole of the foot, the rocker control part is used to control the first catcher to follow the sole of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More