Distributed sound source detection method and sound detection robot based on method
A detection method and robot technology, applied in the direction of instruments, manipulators, measuring devices, etc., to achieve the effects of high detection accuracy, strong fault tolerance and survivability, and large detection range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
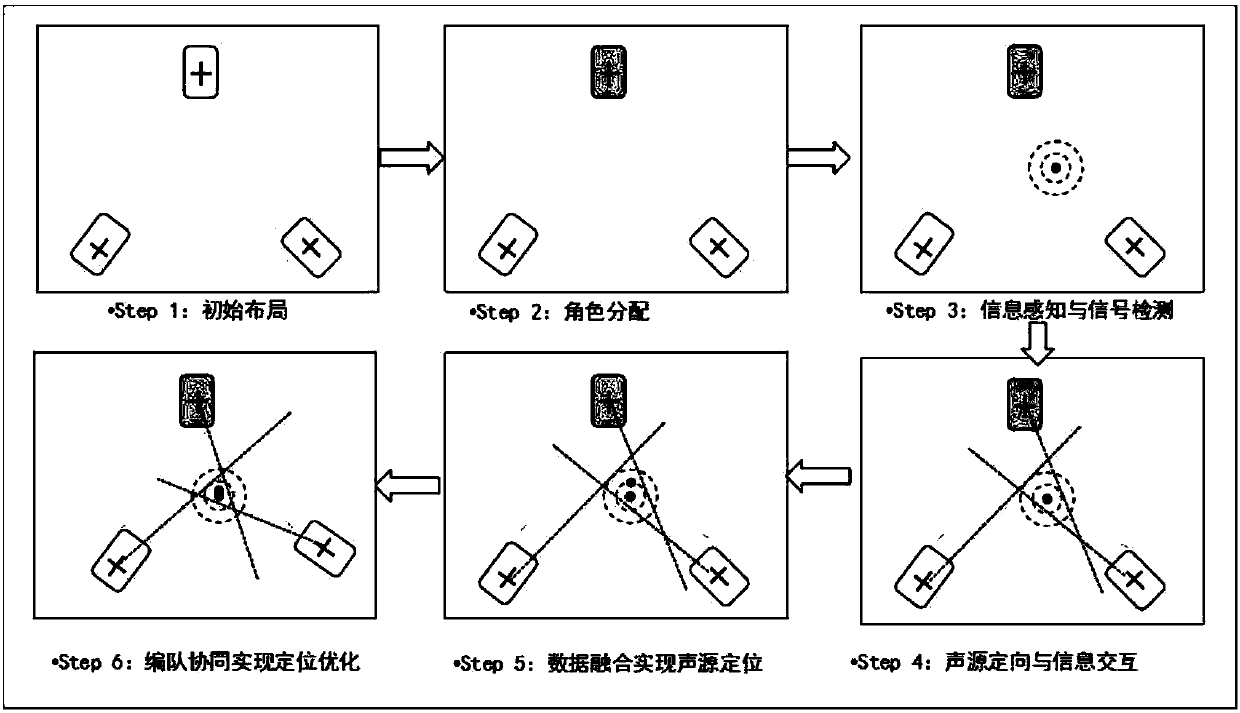
[0042] The core idea of the present invention is to use multiple mobile robots with sound source detection capabilities, through a wireless sensor network, and adopt a cross direction finding algorithm to fuse the sound source orientation information of multiple robots, so as to realize real-time positioning and trajectory tracking of sound source targets.
[0043] The distributed sound source detection method based on the present embodiment is as follows:
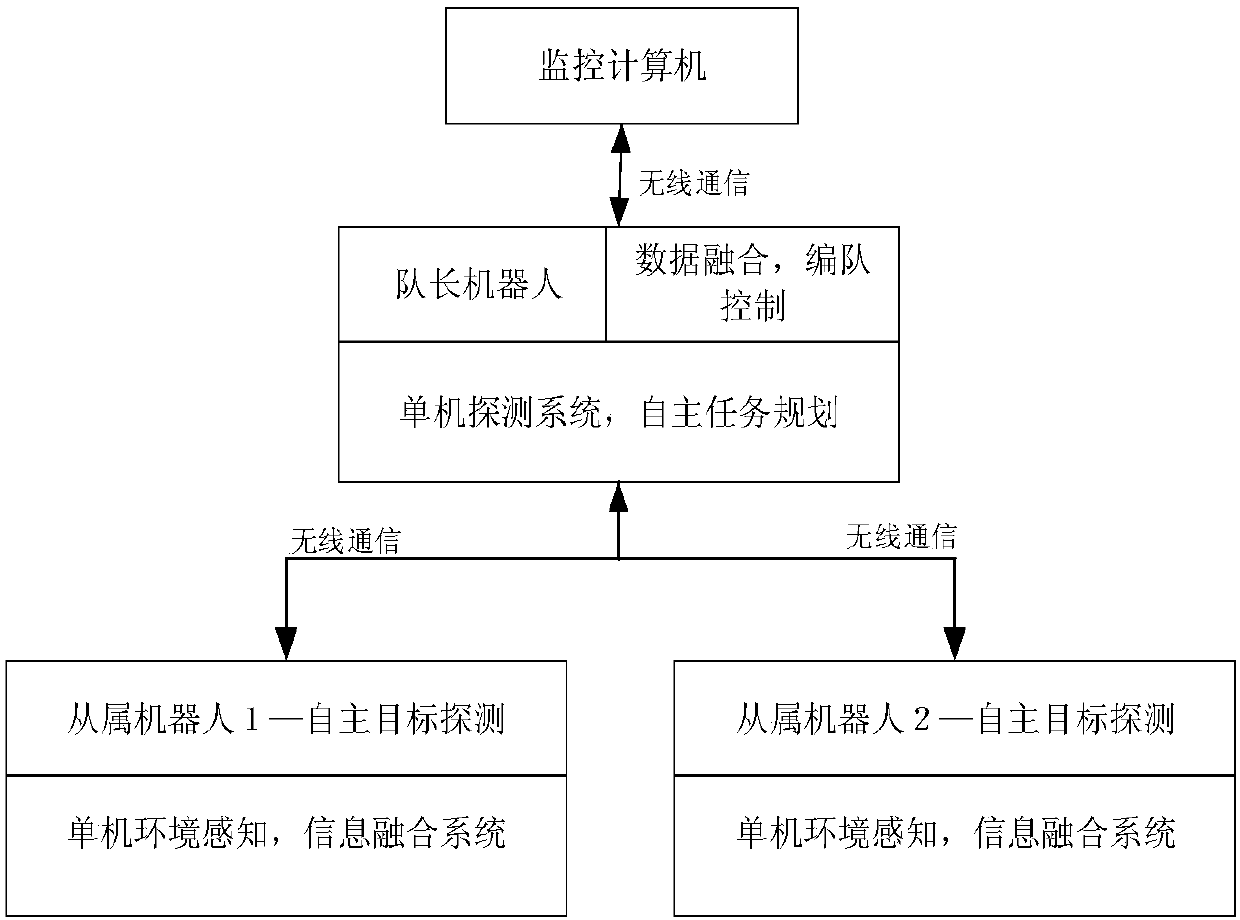
[0044] The distributed sound source detection method of this real-time example is based on a multi-robot formation cooperative sound source detection system composed of one monitoring computer and three sound detection robots. The method includes the following steps, as shown in the appendix figure 1 shown.
[0045] Step 1, system layout: place 3 sound detection robots in a square area of 50m×50m, and place them in an equilateral triangle topology as much as possible according to the site conditions according to the op...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com