

Walking motion planning method for biped walking robot
A walking robot, walking motion technology, applied in motor vehicles, instruments, transportation and packaging, etc., can solve problems such as violation of stability constraints joint trajectory, slow walking speed, and unreasonable footprint planning of robot dynamics.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention is specifically described below through exemplary embodiments. It should be understood that the scope of the present invention should not be limited to the scope of the examples. Any changes or changes that do not depart from the gist of the present invention can be understood by those skilled in the art. The protection scope of the present invention is determined by the scope of the appended claims.
[0017] 1. Component composite dynamic model:
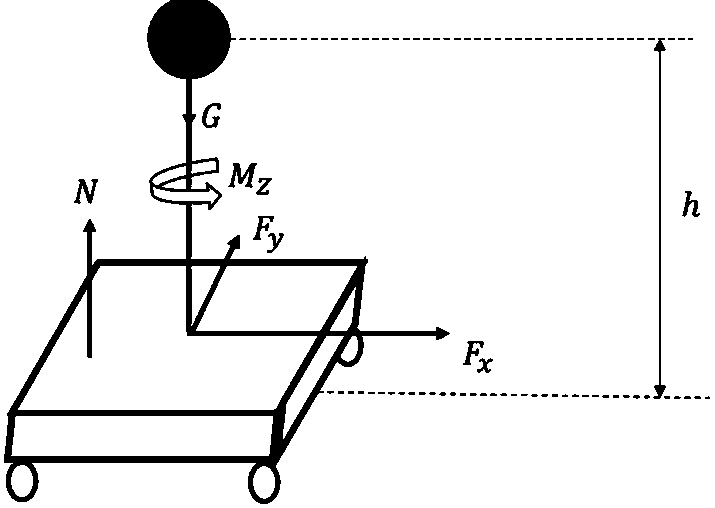
[0018] Different dynamic models are used in different stages of motion planning, so several different models are constructed into a composite dynamic model to meet the needs of different motion planning stages. In the path planning and path following stages, the omnidirectional mobile car is used as the model, and the car does not overturn as the dynamic constraint condition, considering the dynamic constraints in the footprint transformation, that is, the connection constraints between strides; betwee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More