

Novel humanoid movement system of robot
A robot motion and motion system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of difficulty in ensuring the consistency and similarity of the motions of the joints of the human arm and the robot arm, and reduce efficiency and The effect of strict requirements on precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in more detail and complete below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
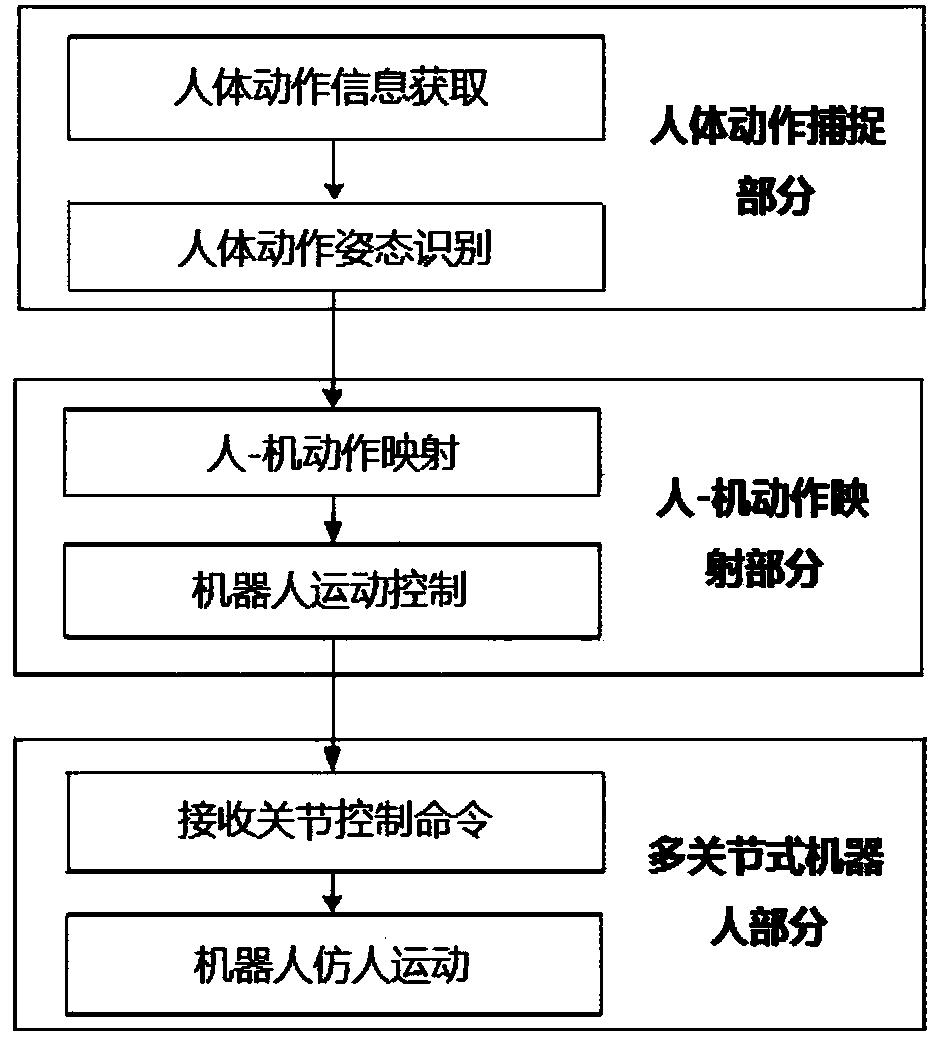
[0022] refer to figure 1 , a new type of robot humanoid motion system of the present invention, the system includes: a human body motion capture part, a human-machine motion mapping part and a multi-joint robot part; wherein, the human body motion capture part and the human-machine The action mapping part is connected; the human-machine action mapping part is connected with the multi-joint robot part through wireless local area network communication.
[0023] in,
[0024] (1) The human motion capture part obtains human motion information by collecting images and depth information of human motion, and utilizes joint point recognition and skeleton tracking technology to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More