

Wearable upper limb bionic flexible exoskeleton robot and power-assisted method thereof
An exoskeleton robot and wearable technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that the wearer deviates from the natural movement mode, the cumbersome adjustment mechanism, and the inability to lift the arm and grasp, etc., to achieve human The effect of machine behavior synergy and light structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
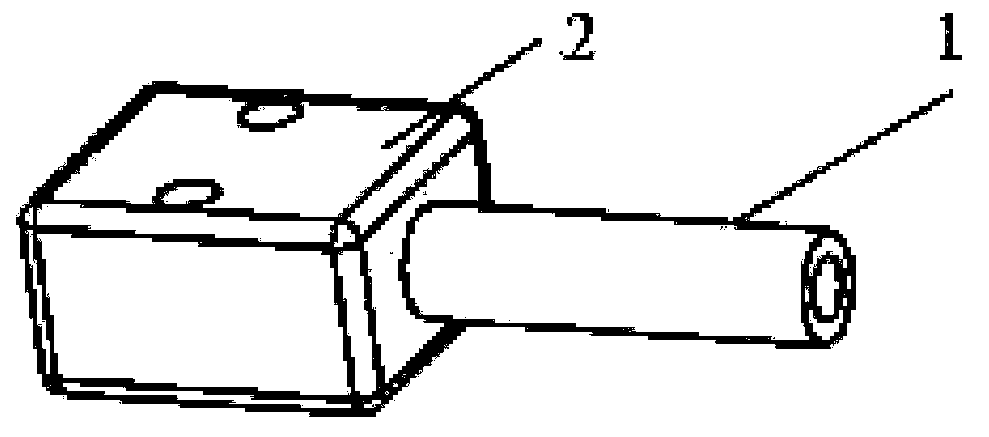
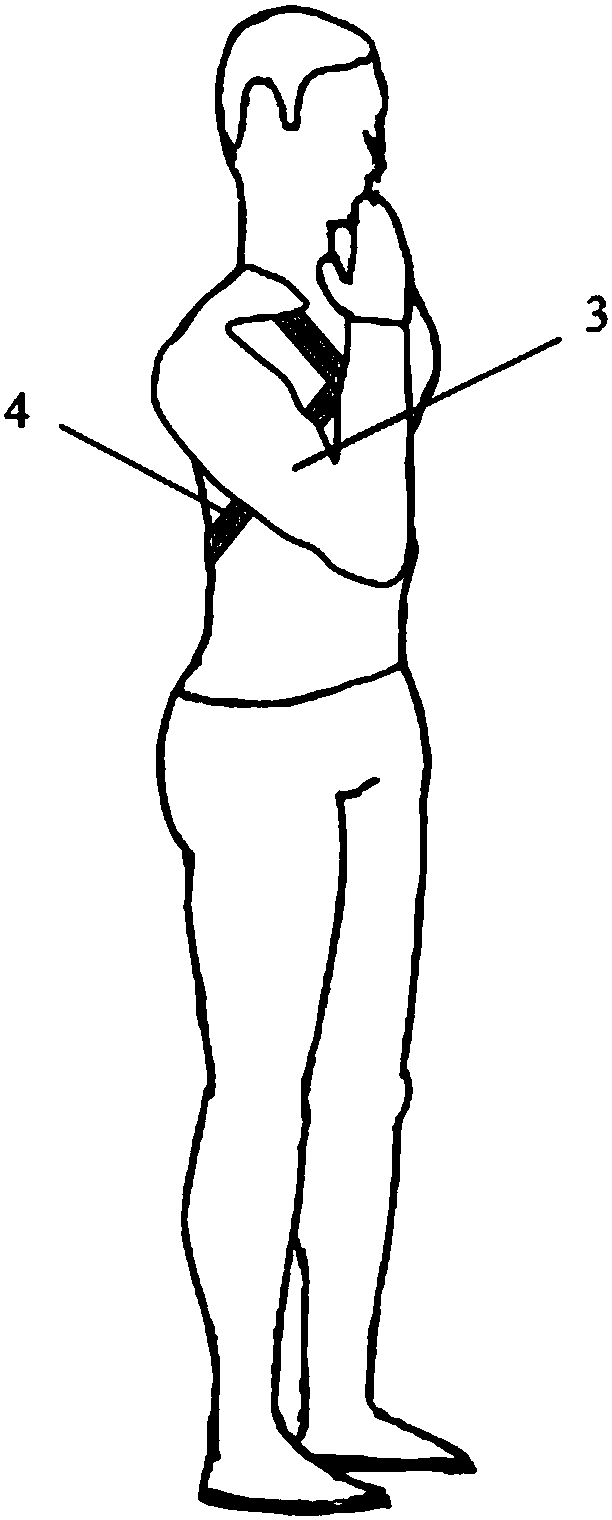
[0044] A wearable upper limb bionic flexible exoskeleton robot, in which node pairs are set at the skin corresponding to the two endpoints of each skeletal muscle of the human body, and the node pairs are connected by tension lines;
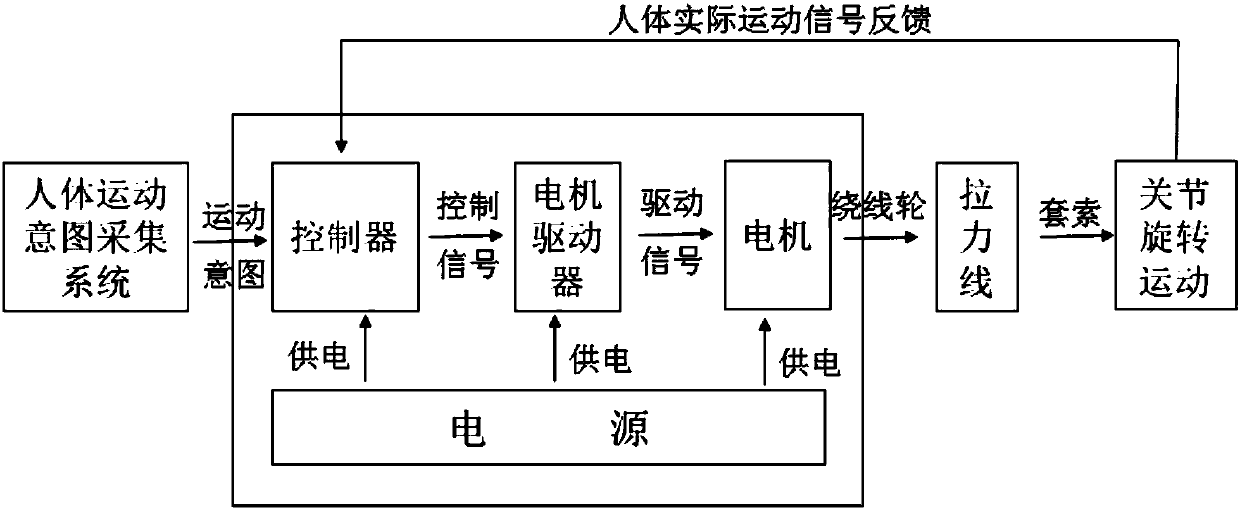
[0045] The control system includes: controller, motor driver, motor and power supply. The controller connects the motor through the motor driver, sends control commands to the motor, drives the motor to work through the motor driver, and the power supply supplies power to the control system;
[0046] The tension wire is wound on the winding wheel at the output end of the motor, and the tension output is performed on the node pair.
[0047] The node pair includes a far-end node and a near-end node, wherein the far-end node is the node farther away from the controller along the shoulder direction among the two node...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More