

Yaw stability control method for representing nonlinear characteristics of automobile
A kind of stability control and nonlinear technology, applied in the field of vehicle yaw stability control, which can solve the problems of low control accuracy and narrow controller stability range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
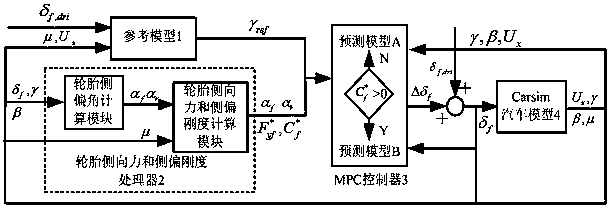
[0081] figure 1 It is a schematic diagram of the system structure of a yaw stability control method embodying the nonlinear characteristics of the automobile according to the present invention. The system mainly includes a reference model 1, a tire lateral force and cornering stiffness processor 2, an MPC controller 3, and a Carsim vehicle model. 4. Reference Model 1 is used to determine the desired vehicle yaw rate; Tire Lateral Force and Cornering Stiffness Processor 2 is used to determine tire slip angle, lateral force and cornering stiffness; CarSim Vehicle Model 4 is used to output the vehicle's Actual motion state information, including vehicle longitudinal speed, yaw rate, center of mass slip angle, and road adhesion coefficient; MPC controller 3 selects a prediction model based on tire cornering stiffness, and combines the expected vehicle yaw ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More