

Remote control system and method of robot based on inertial motion capture
A remote control system and motion capture technology, applied in the input/output process of data processing, instruments, manipulators, etc., can solve the problems of single remote control mode, inability to anthropomorphize, and robot remote control technology limited to personal computers. achieve the effect of avoiding harm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The present invention will be described in more detail and complete below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
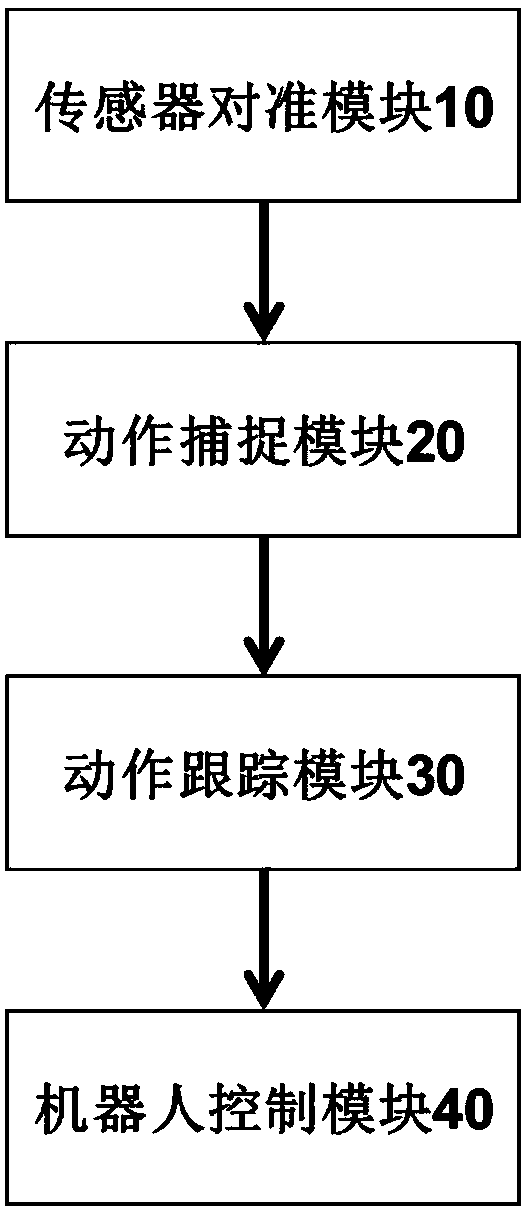
[0012] figure 1 is a schematic diagram of a robot remote control system based on inertial motion capture according to an embodiment of the present invention.
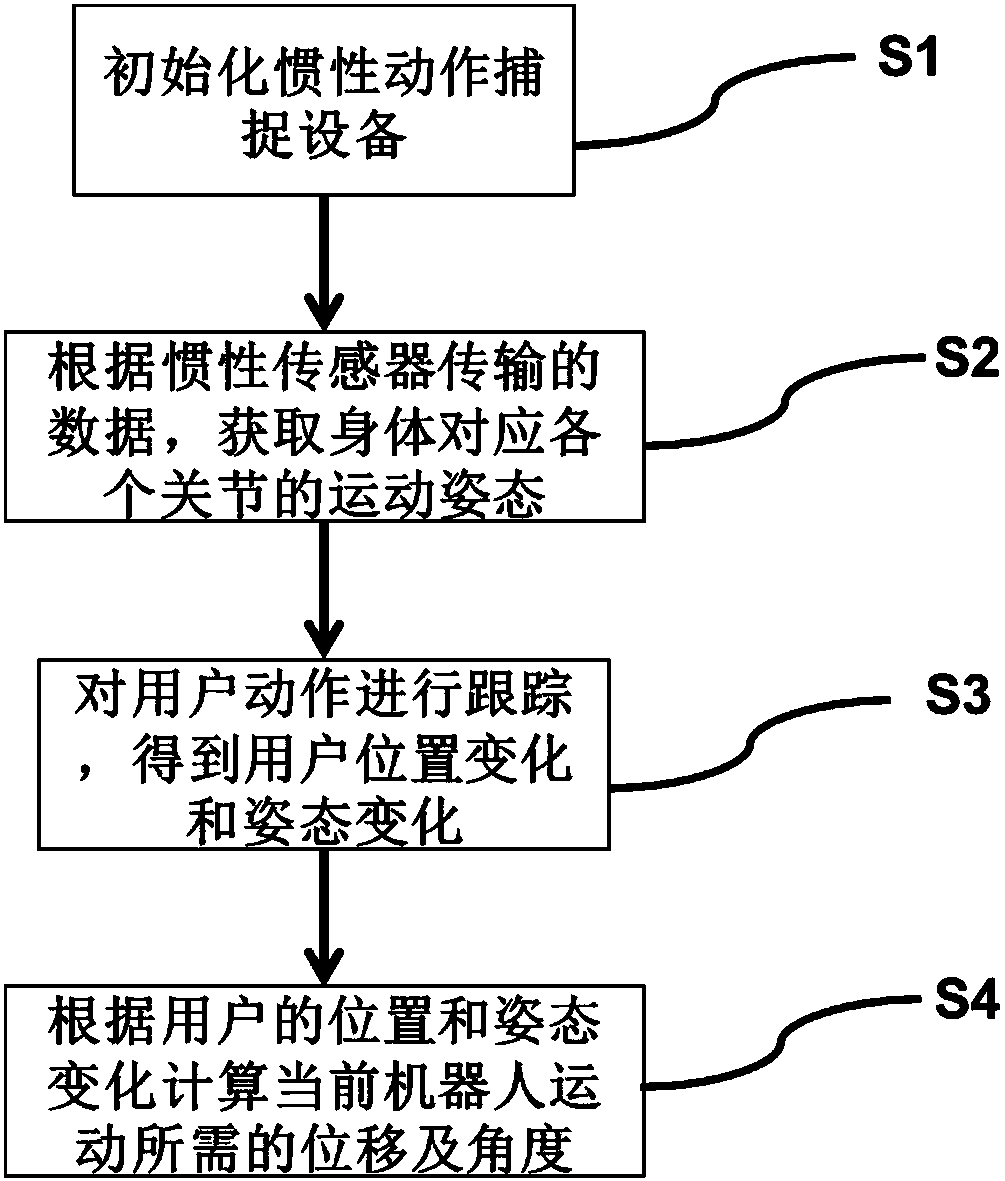
[0013] refer to figure 1 , the robot remote control system based on inertial motion capture includes: a sensor alignment module, which initializes the inertial motion capture device; a motion capture module, which acquires the motion posture of each joint corresponding to the body according to the data transmitted by the inertial sensor; and an action tracking module, for The user's movement is tracked to obtain the user's position change and attitude change; the robot control module calculates the displacement ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More