

Pose estimation method and device based on rectangular identifier and robot
A pose estimation and rectangular technology, applied in the field of computer vision, can solve the problems of large error and redundancy in the calculated pose, and achieve the effect of accurate calculated pose
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
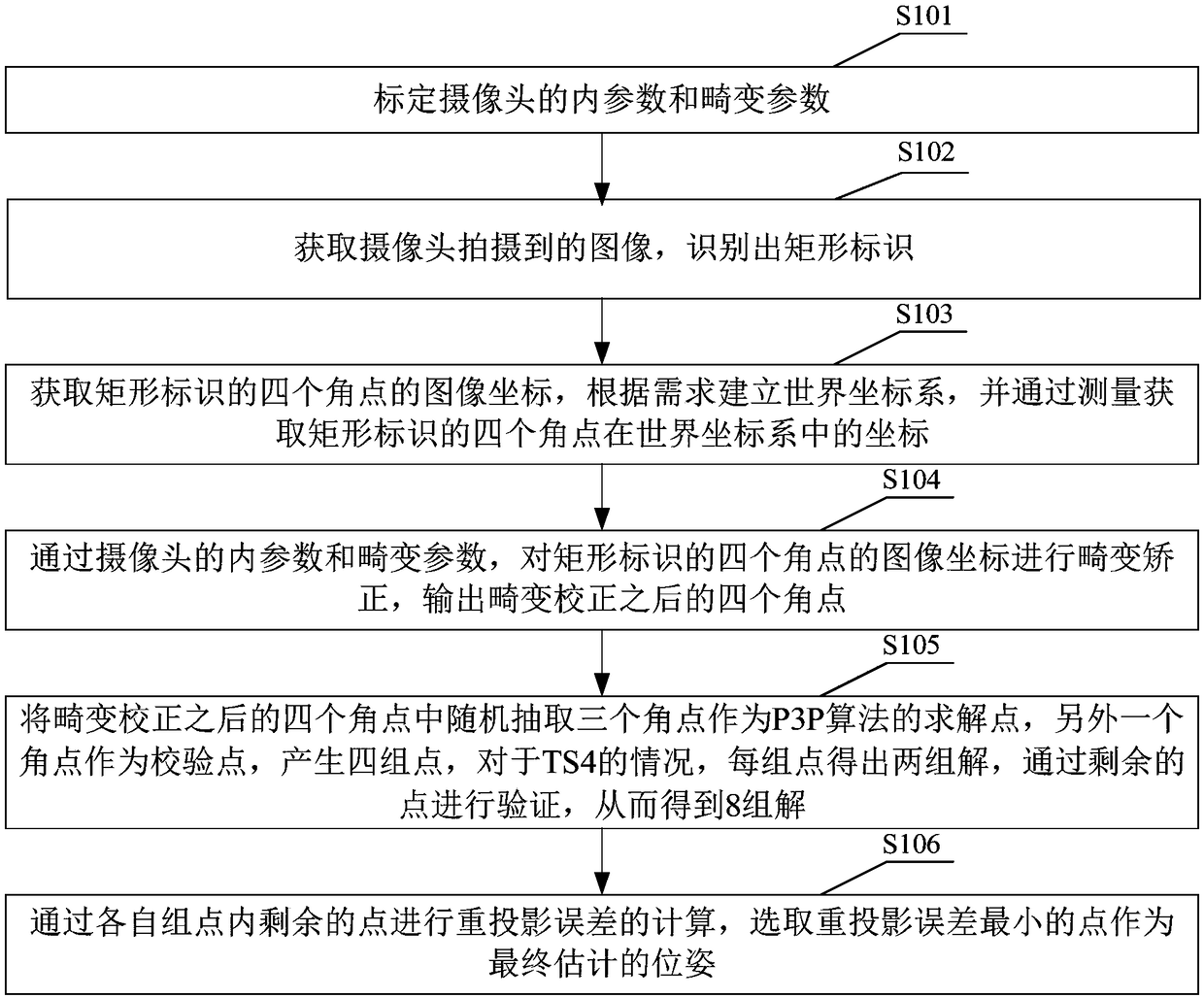
[0033] see figure 1 , the method for estimating poses based on rectangular markers provided in Embodiment 1 of the present invention includes the following steps: It should be noted that if there are substantially the same results, the method for estimating poses based on rectangular markers in the present invention does not use figure 1 The flow sequence shown is limited.
[0034] S101. Calibrate internal parameters and distortion parameters of the camera.
[0035] The internal parameters include the focal length of the camera (f x , f y ) and optical center coordinates (c x 、c y ).
[0036] S102. Acquire the image captured by the camera, and identify the rectangular mark.
[0037] In Embodiment 1 of the present invention, S102 may specifically include the following steps:
[0038] Obtain the image captured by the camera;
[0039] convert the image to grayscale;
[0040] Using adaptive binarization operations and contour search operations to find all rectangular cont...
Embodiment 2
[0098] see Figure 5 The device for estimating poses based on rectangle markers provided in Embodiment 2 of the present invention includes:
[0099] Calibration module 11, used for calibrating internal parameters and distortion parameters of the camera;
[0100] Recognition module 12, is used for obtaining the image that camera is captured, and recognizes rectangular sign;
[0101] The coordinate acquisition module 13 is used to obtain the image coordinates of the four corner points of the rectangle mark, establish a world coordinate system according to requirements, and obtain the coordinates of the four corner points of the rectangle mark in the world coordinate system by measuring;
[0102] The distortion correction module 14 is used for carrying out distortion correction to the image coordinates of the four corner points identified by the rectangle through the internal parameters and the distortion parameters of the camera, and outputting the four corner points after the ...
Embodiment 3
[0107] Embodiment 3 of the present invention provides a computer-readable storage medium, where a computer program is stored in the computer-readable storage medium, and when the computer program is executed by a processor, the rectangle-based identification provided by Embodiment 1 of the present invention is implemented. The steps of the pose estimation method.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More