

High-precision buoyancy regulating device for autonomous underwater robot
An underwater robot and buoyancy adjustment technology, which is applied to underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problems of large volume of buoyancy adjustment devices, limited adjustment accuracy, and complicated operation, and achieve high space utilization. The effect of short oil circuit and high mechanical efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below with reference to the drawings.
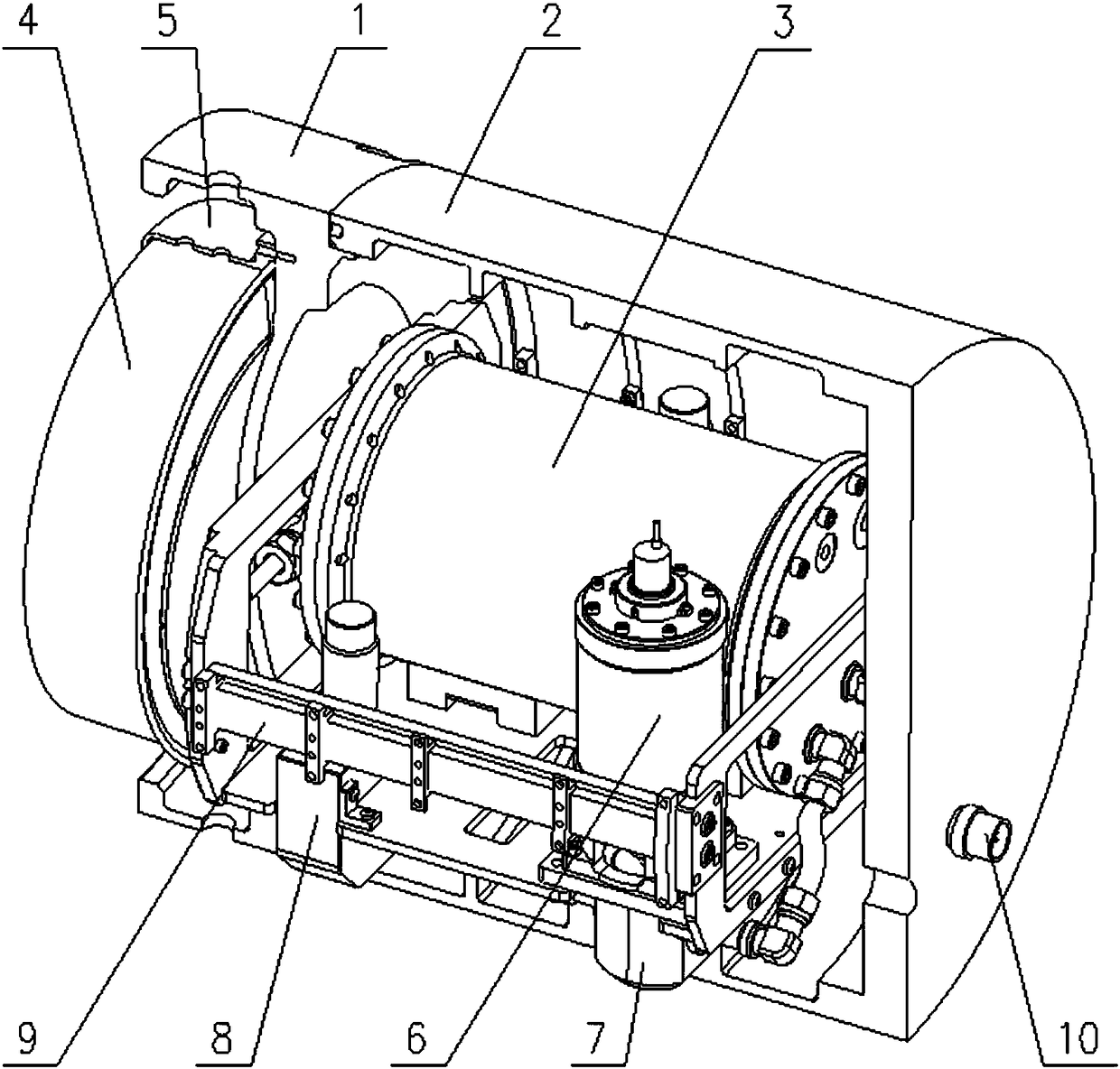
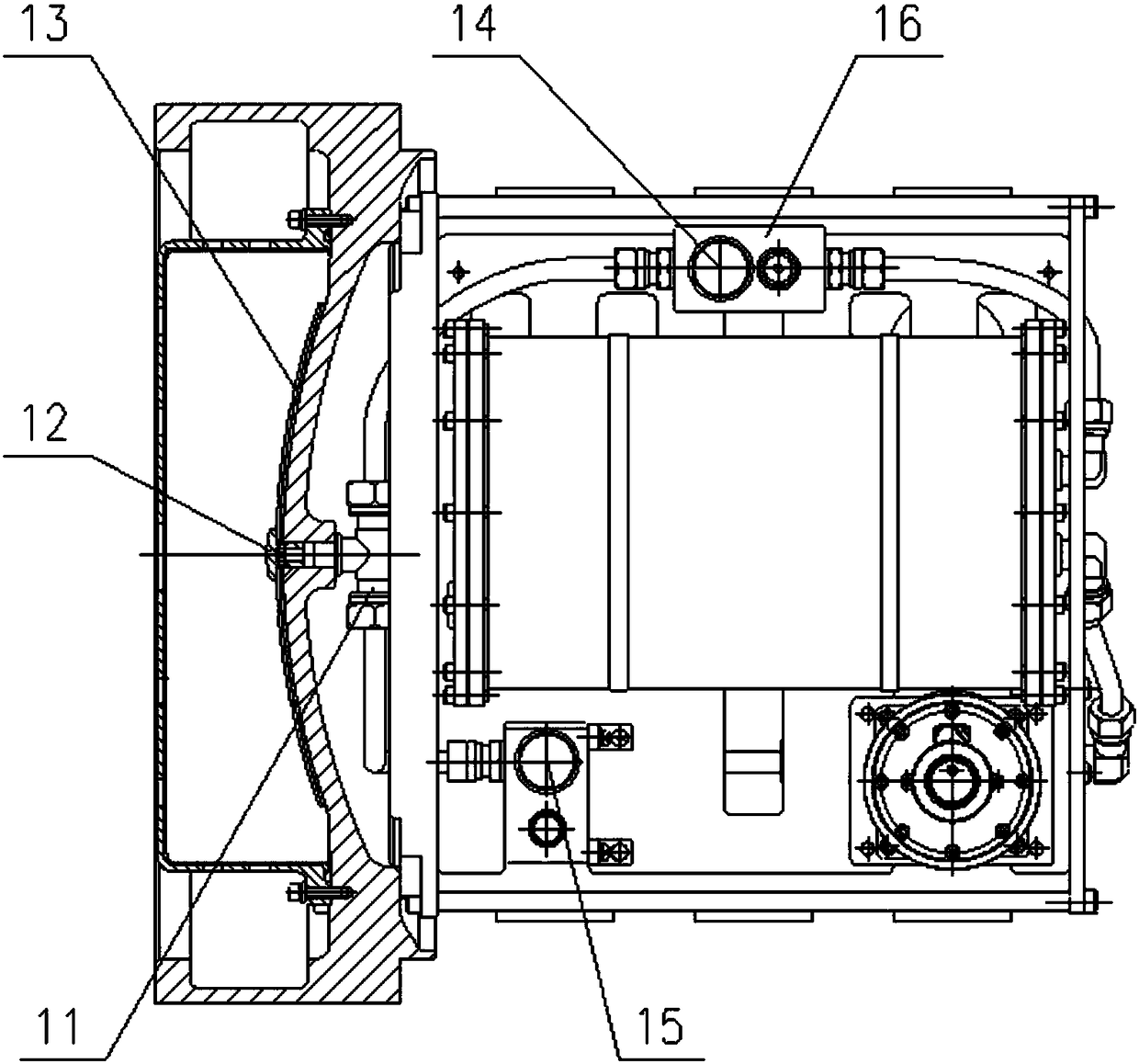
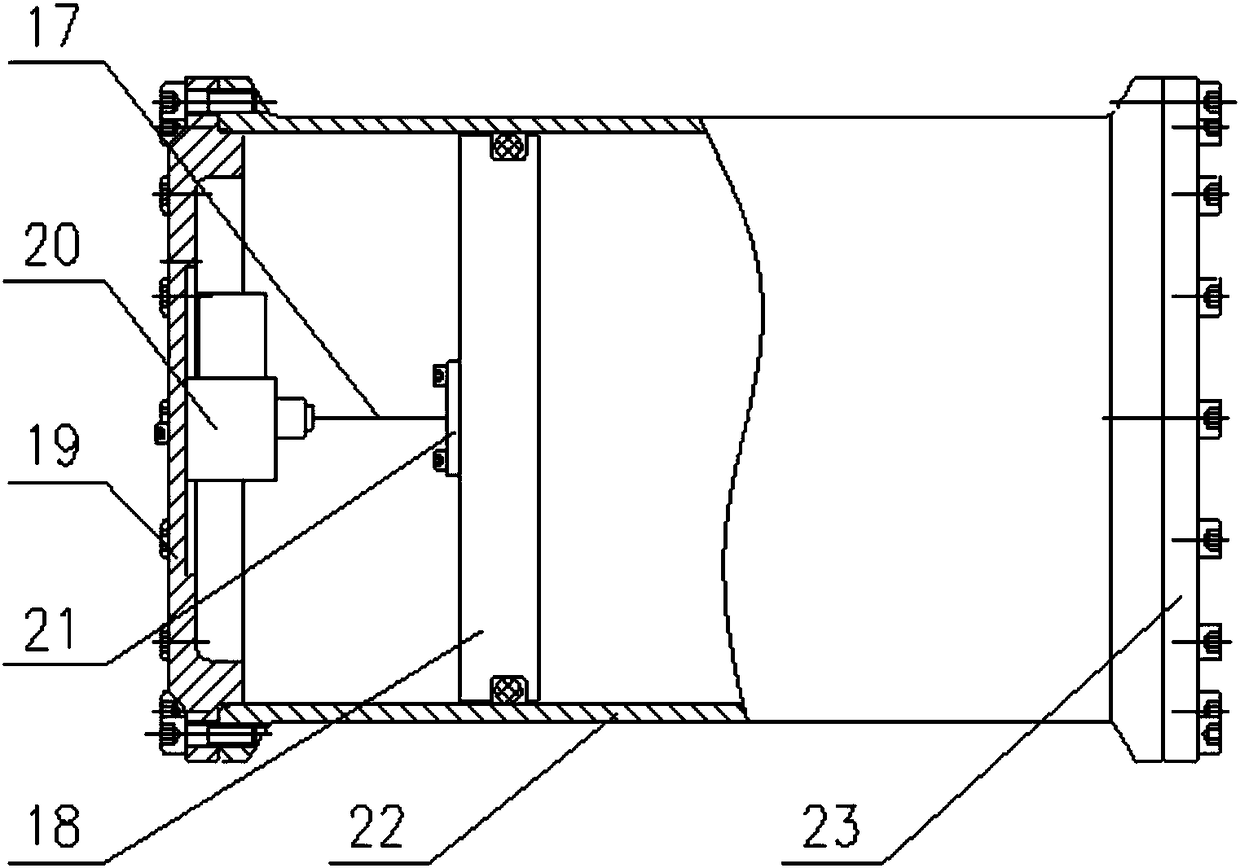
[0028] Such as Figure 1~4 As shown, the present invention includes a permeable housing 1, a sealed housing 2, an inner oil cylinder 3, an outer oil bag 4, a DC motor 6, a gear pump 7, a valve group A8 and a valve group B16, wherein one end of the permeable housing 1 is an opening It communicates with seawater, and the other end is connected with the sealed shell 2 to form a pressure-resistant dry chamber in the sealed shell 2. An outer oil sac 4 is provided in the permeable shell 1, and all the sealed shells are provided in the sealed shell 2. The inner cylinder 3, the DC motor 6, the gear pump 7, the valve group A8 and the valve group B16, such as figure 1 with Figure 4 As shown, the gear pump 7 is driven to rotate by the DC motor 6, the oil outlet port of the inner cylinder 3 is connected to the oil inlet port of the gear pump 7, and the oil outlet port of the gear pump 7 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More