

Automatic drive direction control system and method based on high-precision navigation and positioning system
A technology of automatic driving control, navigation and positioning, applied in non-electric variable control, two-dimensional position/lane control, vehicle position/route/altitude control, etc. and other problems, to achieve the effect of solving untimely direction control, good economy and feasibility, and improved comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
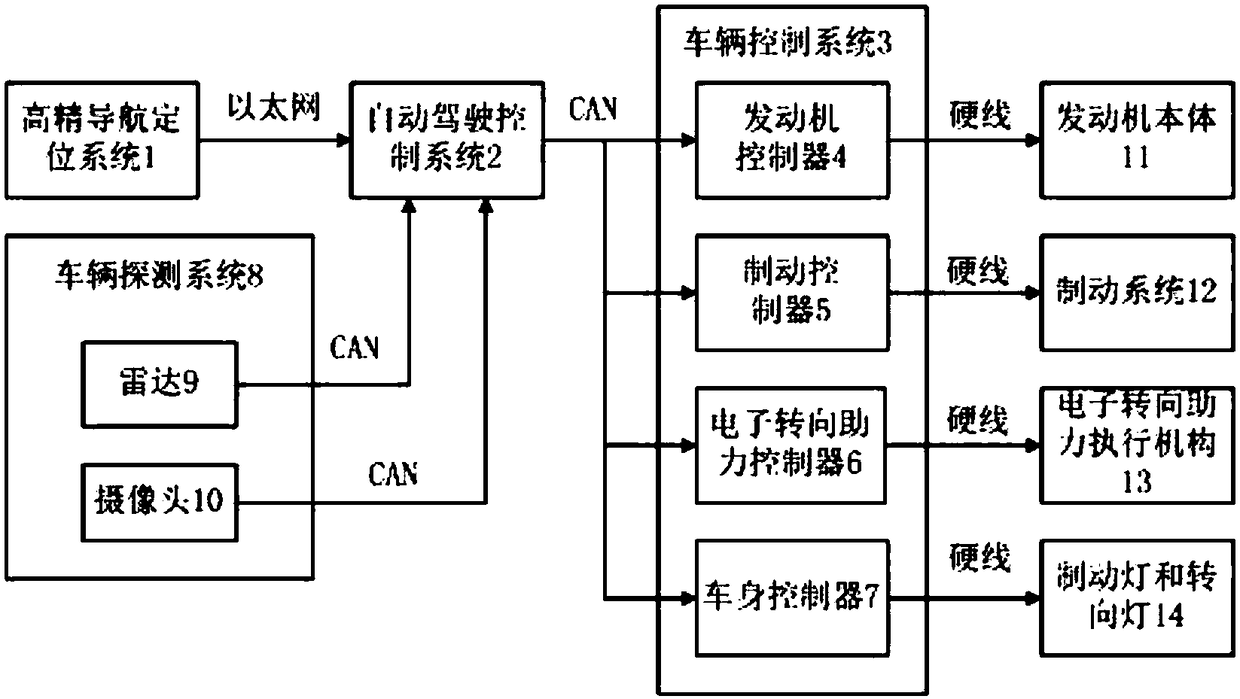
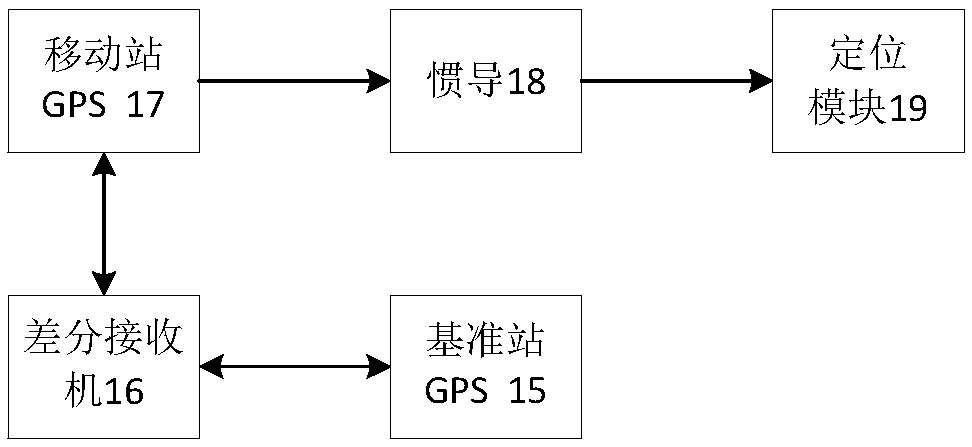
Method used
Image

Examples
example 1
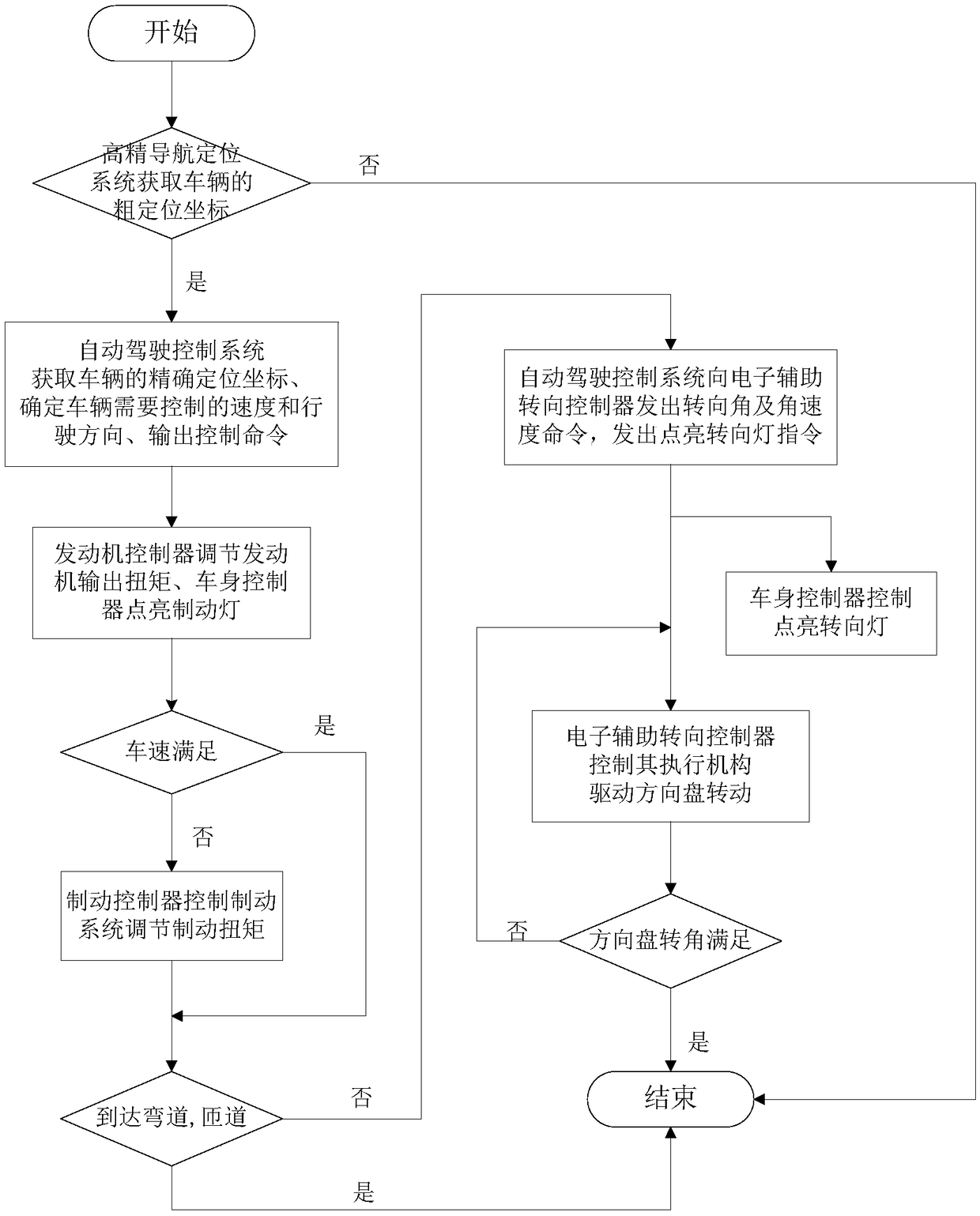
[0029] Example 1: Vehicle decimeter-level positioning coordinates D (X, Y, Z), the distance between the vehicle and the speed limit sign is 49.99 meters; the distance between the front speed limit sign and the vehicle recognized by the vehicle camera and radar is 50.55 meters, and D( The coordinates of X, Y, Z) are D'(X, Y+50.55-49.99, Z). Since the laser radar ranging accuracy is less than 2cm, the corrected vehicle positioning accuracy reaches centimeter-level accuracy.
example 2
[0030] Example 2: The positioning coordinates D (X, Y, Z) of the vehicle at the decimeter level, the distance between the vehicle and the lane line is found to be 0.35 meters on the high-precision map; the distance between the vehicle and the lane line recognized by the camera is 0.54 meters; the coordinate D can be corrected (X,Y,Z) is D'(X+0.54-0.35,Y,Z). Since the ranging accuracy of the high-definition camera is less than 3cm, the corrected vehicle positioning accuracy reaches the centimeter level.
example 3
[0031] Example 3: The current vehicle speed V1 is 60km / h. Through the high-precision navigation and positioning system, radar, and camera, it is found that the distance D of the curve ahead is 100m, the speed limit V2 of the curve is 30km / h, and the time for the vehicle to reach the curve is t=D / V1*3600 / 1000, calculate the deceleration a=(V2-V1) / t*1000 / 3600 when the vehicle speed changes from V1 to V2, compare it with the anti-drag deceleration a' generated by setting the accelerator pedal of the engine system to zero, if a < a', the vehicle braking is accomplished by the engine system; otherwise, the vehicle braking is accomplished jointly by the engine system and the braking system.
[0032] Steering wheel steering angle calculation: r=R / d; (d is a constant calculated by the vehicle steering system).
[0033] Steering wheel angular velocity calculation: ɑ=f(e, r); (f(e, r), e is a constant calculated by the vehicle steering system, f(e, r) is the calculation function of ang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More