

Target object spatial point cloud feature-based automatic splicing method
A space point cloud and target object technology, applied in the field of point cloud data splicing technology, can solve problems such as poor stability, splicing failure, and failure to meet the needs of practical applications, etc., to achieve accurate splicing, improve efficiency, and eliminate splicing traces.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
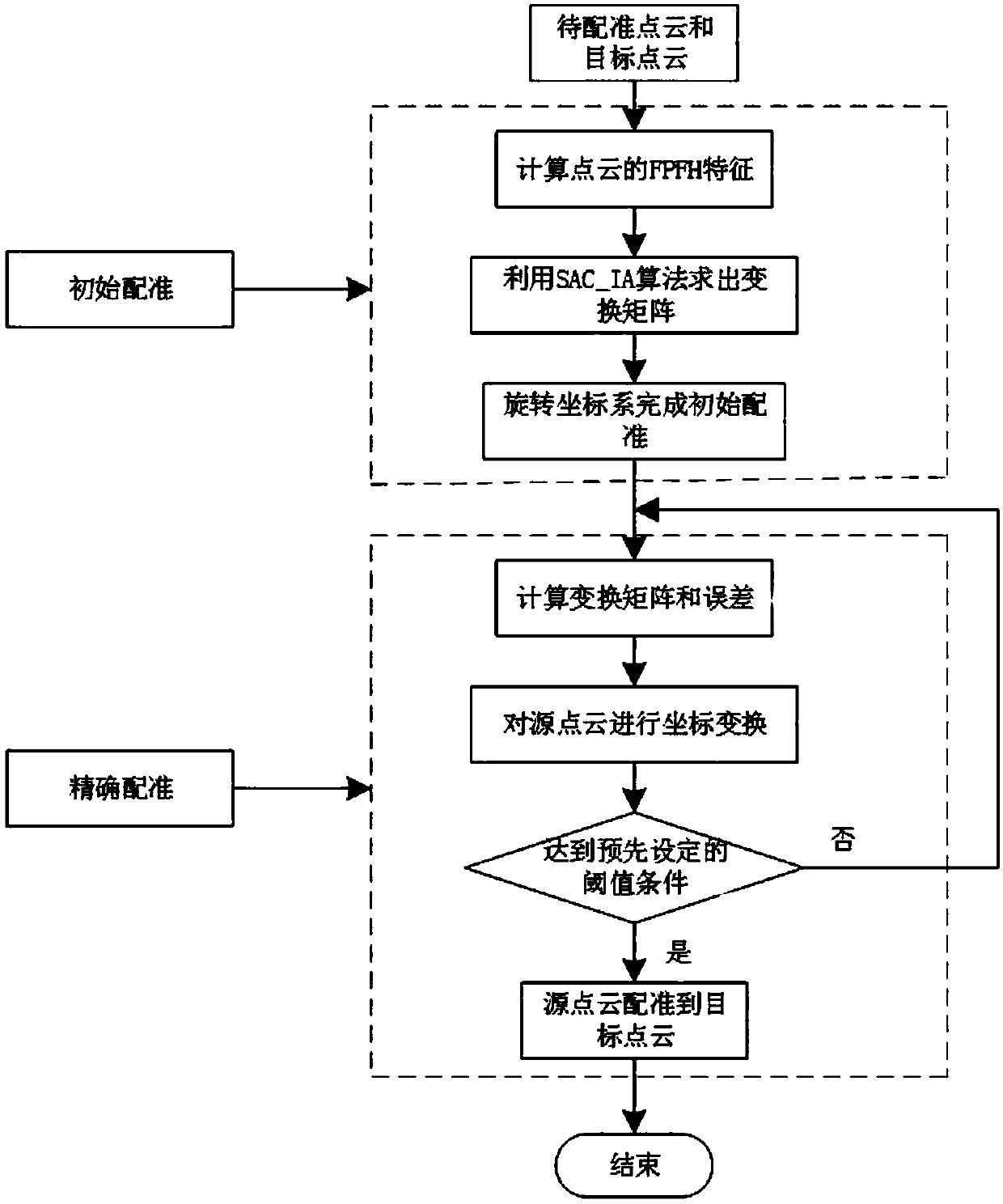
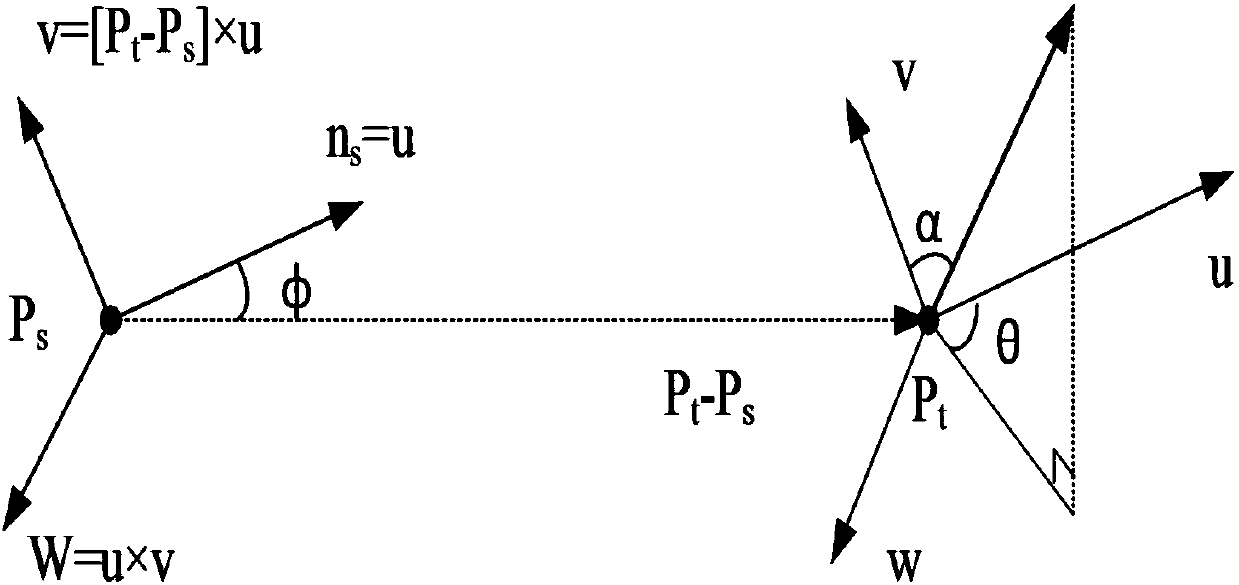
[0058] Such as Figure 1-Figure 4 As shown, an automatic splicing method based on spatial point cloud features of a target object includes the following steps:
[0059] S10. Obtain spatial point cloud information on the surface of the target object by using a scanning device;
[0060] S20. Solving the normal vector of the point cloud surface can be approximately replaced by the normal of the tangent plane of the surface at the point, which becomes a problem of least squares plane fitting estimation.
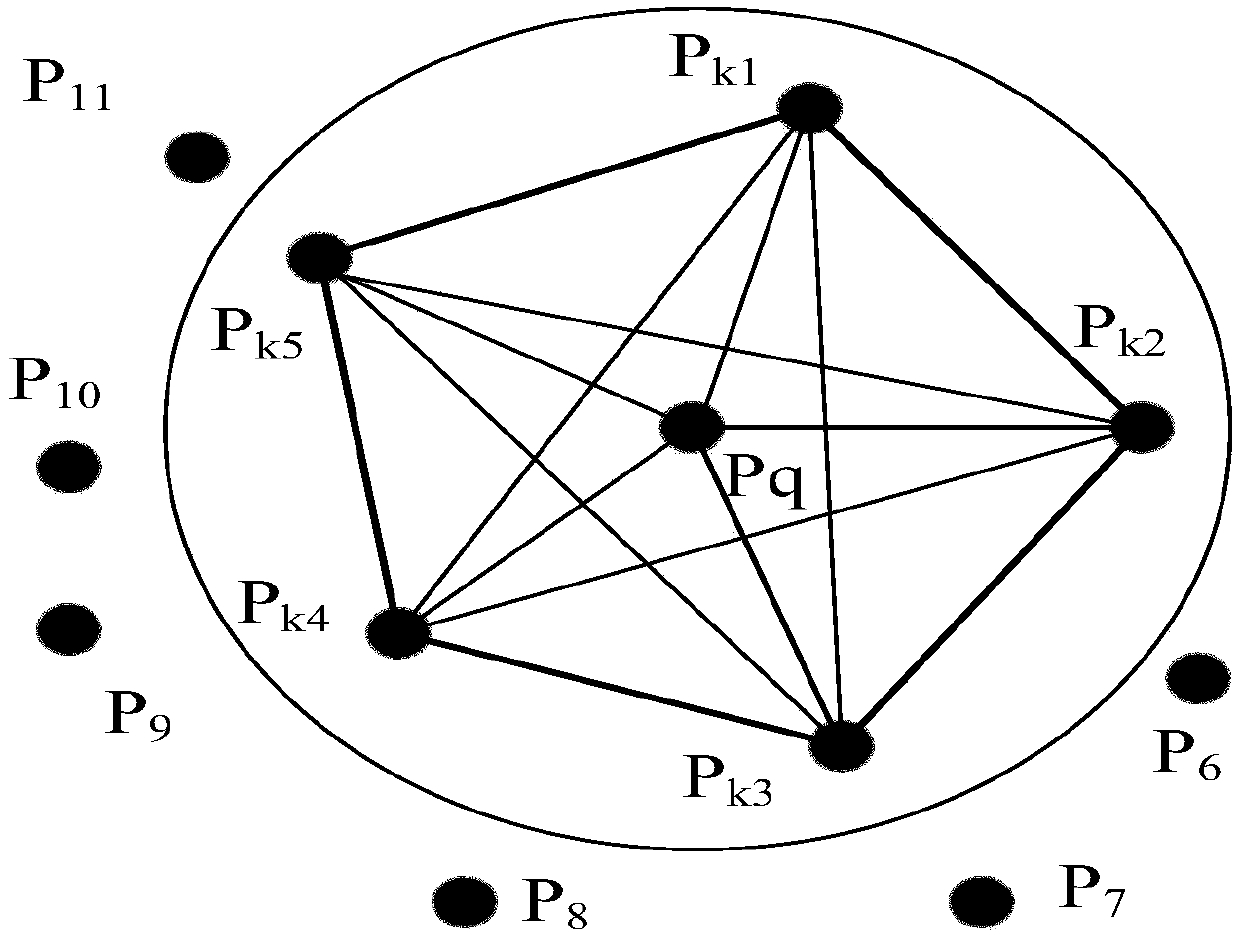
[0061] S201. For a point p on the surface of the point cloud, the coordinates are (x, y, z) T , Its neighboring k neighborhood points are p i , Then the corresponding covariance matrix is:
[0062]
[0063] q is the centroid of all neighboring points of p. Assuming λ n Is the eigenvalue of matrix C, v n Is its corresponding feature vector.
[0064] Cv n =λ n (2)
[0065] λ n And v n Is the nth eigenvalue and eigenvector of the covariance matrix C. The covariance matrix of a point on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More