

Bionic lower-limb external bone robot for auxiliary handling
An exoskeleton robot, lower limb technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that the width of the waist cannot be adjusted with the human body, and the knee joint does not achieve assistance, and achieves comfortable wearing and walking, firm mechanism, and movement. smooth effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
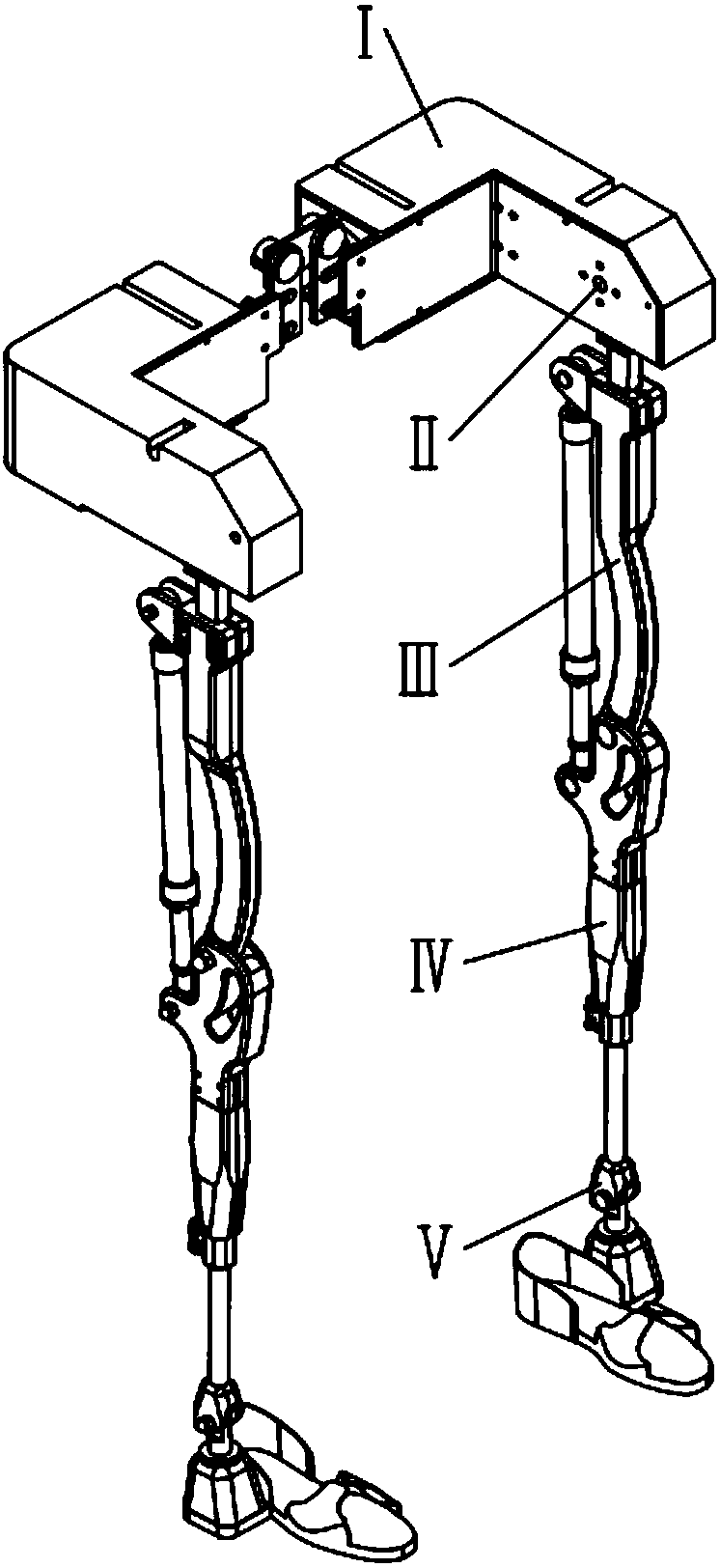
[0024] Such as figure 1 As shown, the present invention is a bionic lower limb exoskeleton robot for auxiliary transportation, which includes from top to bottom: waist module I, hip joint module II, thigh module III, calf module IV and ankle joint module V; and the robot It is a left-right symmetrical structure, with the middle plane as the reference, the left half and the right half are symmetrical, and the right half is taken as an example below for illustration.
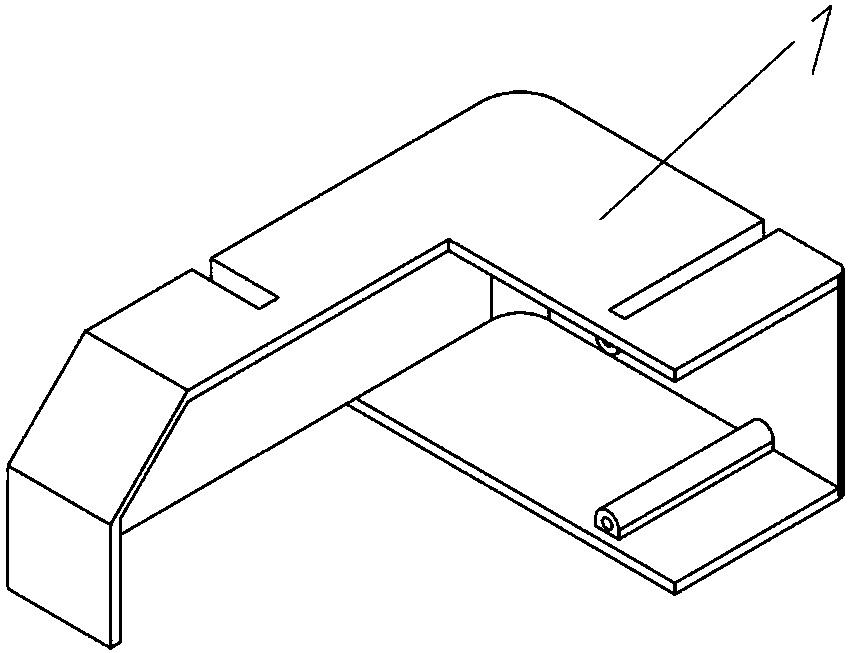
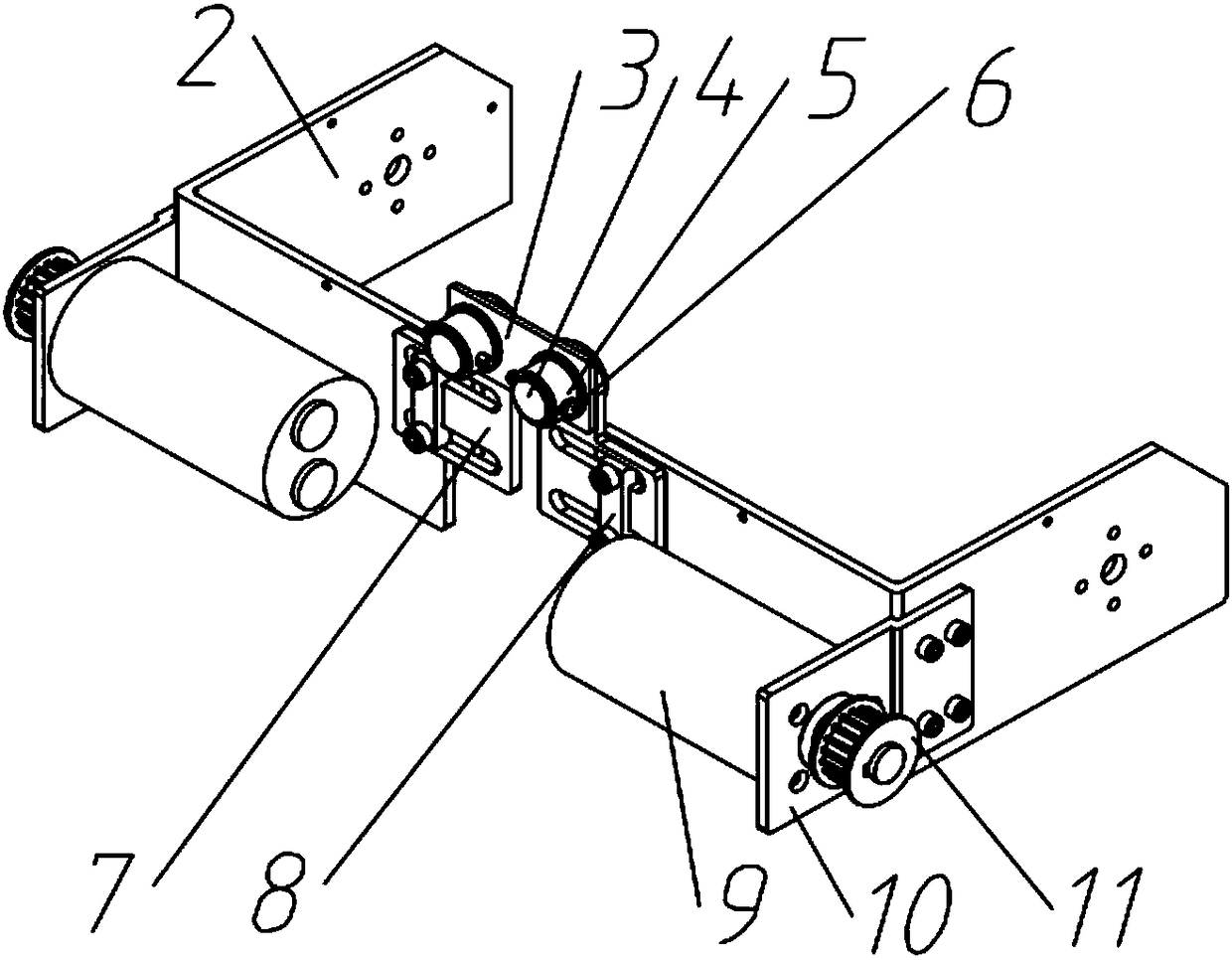
[0025] Such as figure 2 , 3 As shown, waist module I includes: waist shell 1, L-shaped waist bracket 2, connecting shaft 4, sleeve 5, pin shaft 6,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More