

Steering redundancy and integrated control system and method of four-wheel independent driving electric automobile
A four-wheel independent drive, electric vehicle technology, used in automatic steering control components, electric steering mechanisms, power steering mechanisms, etc., can solve the problems of complicated hardware structure and difficult steering for drivers, avoid difficult steering problems, and inhibit acceleration. Insufficient steering characteristics, ensuring the effect of road sense information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
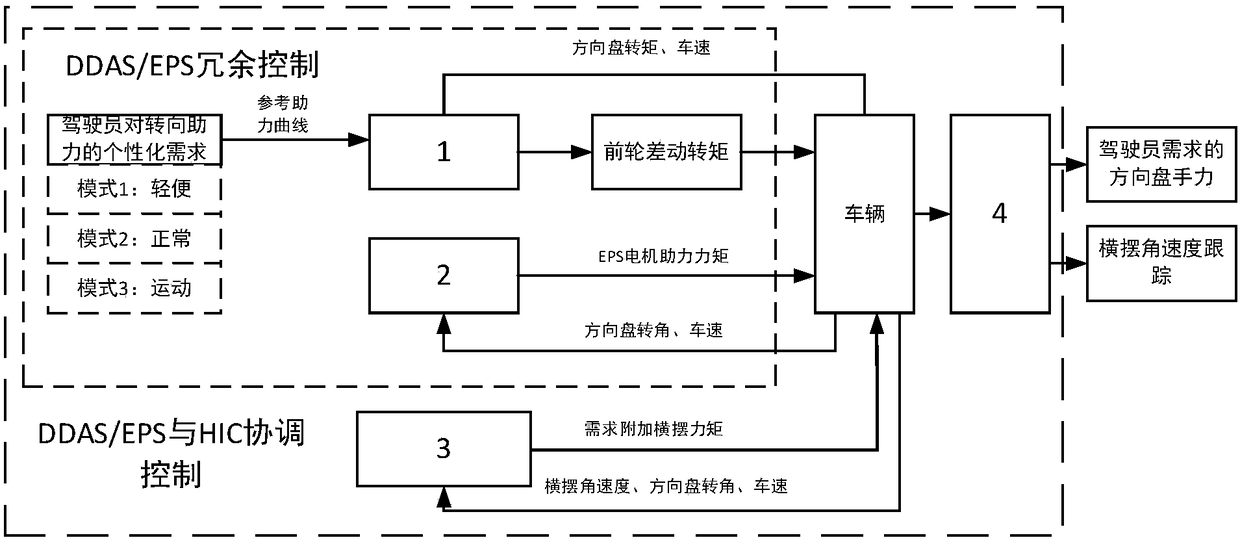
[0044] Such as figure 1 As shown, this embodiment provides a steering redundancy and integrated control system for a four-wheel independent drive electric vehicle, including: a steering redundancy control module, which is used to realize the driver’s personalized demand for steering wheel manual power and EPS (Electronic Power Steering, electric power steering system) completes the steering assist function when the motor fails; maneuverability improvement control module 3, used to track the vehicle's ideal reference yaw rate and improve vehicle handling stability; four-wheel torque distribution control module 4. It is used to realize the functional coordination between the steering redundancy control module and the maneuverability improvement control module.
[0045] Among them, the steering redundancy control module includes: differential power steering module 1 (DDAS, Differential DriveAssisted Steering), which generates the required front axle differential torque according to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More