Lift model-assisted four-rotor aircraft height fault-tolerant estimation method
A quadrotor aircraft, height direction technology, applied in the field of fault-tolerant navigation, to achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
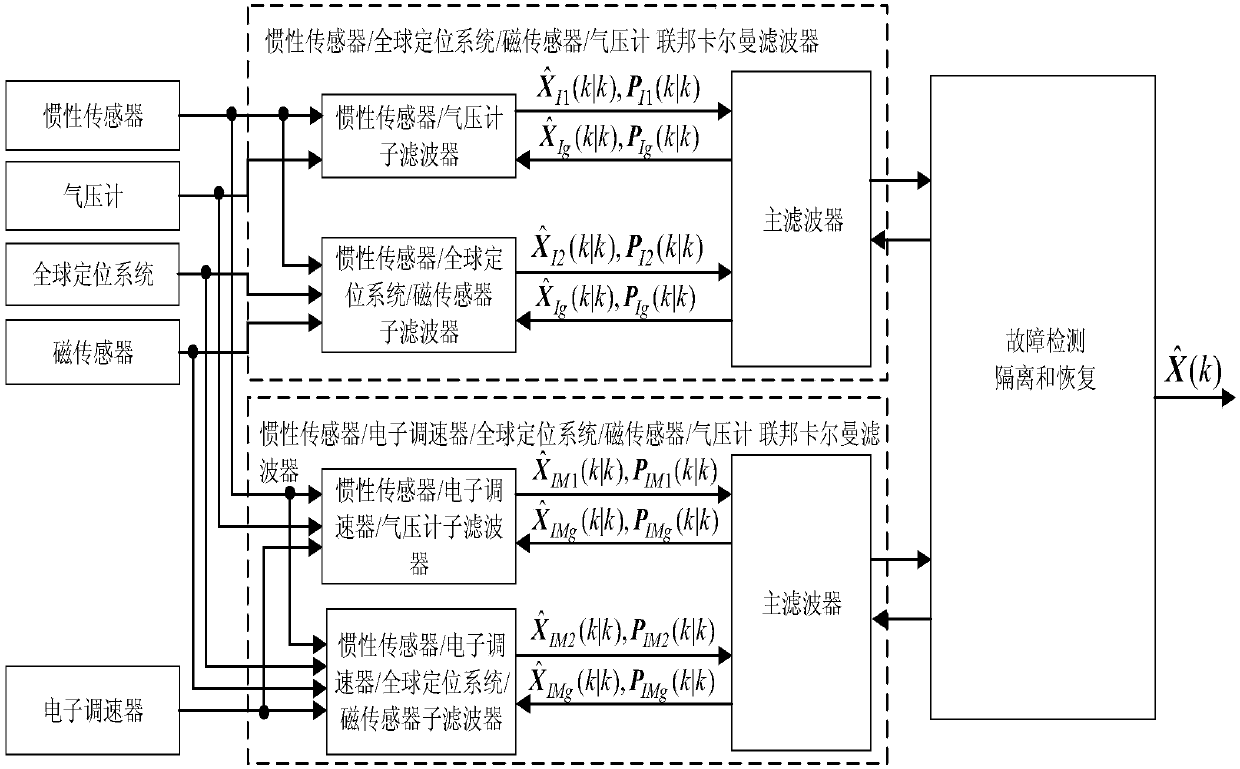
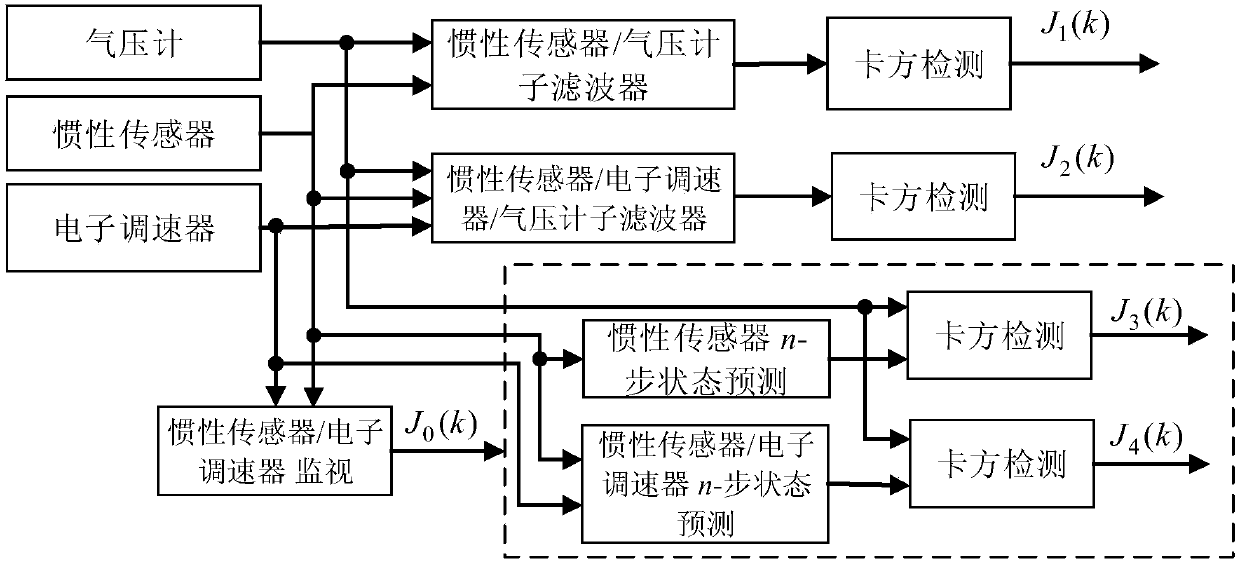
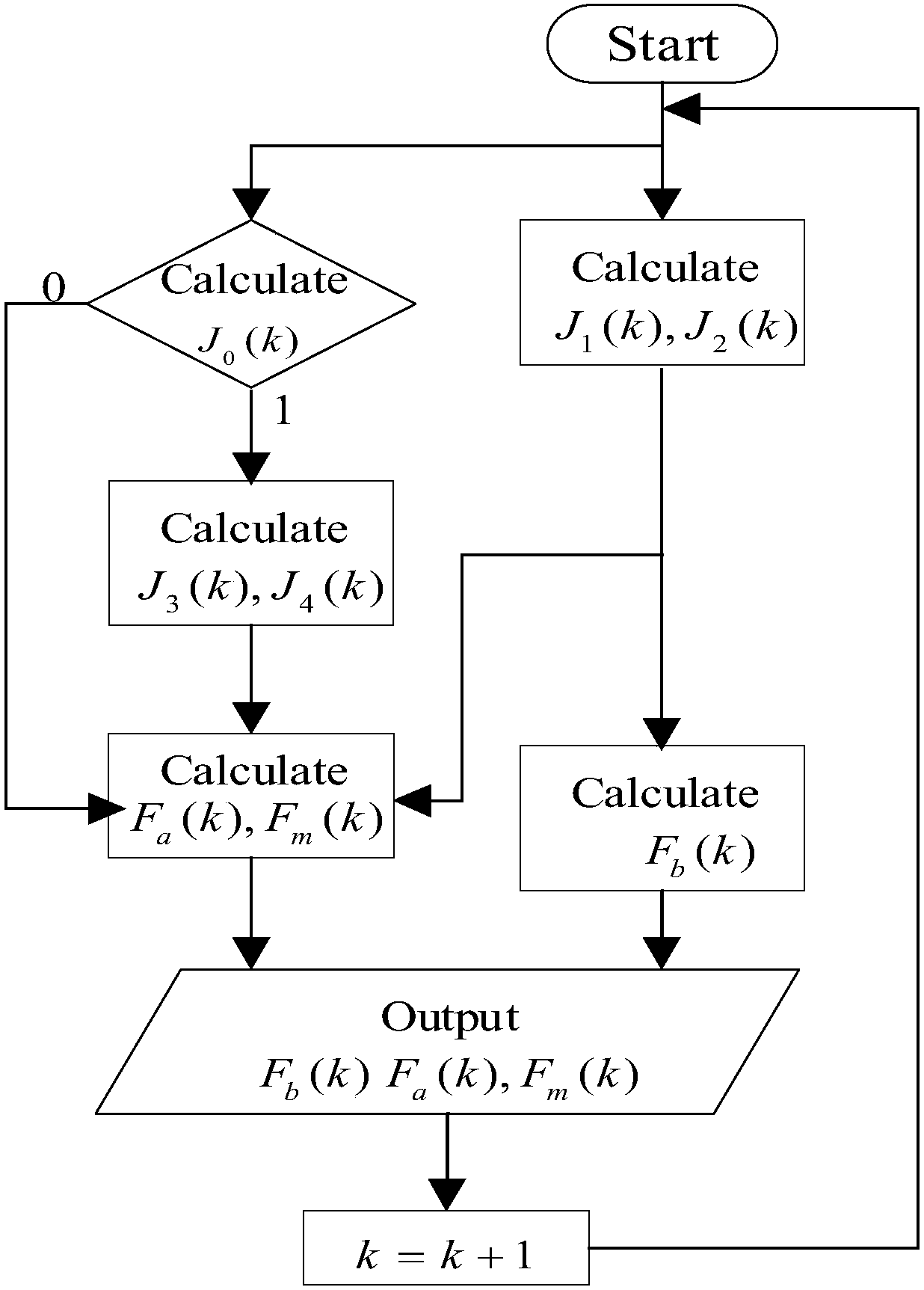
[0018] The present invention proposes a fault-tolerant estimation method for the height of a quadrotor aircraft assisted by a lift model. By using the lift model of the quadrotor aircraft and combining it with an onboard sensor (altimeter), the height estimation of the quadrotor aircraft is provided to form the height of the quadrotor aircraft. The redundancy of the direction sensor, so as to realize the fault diagnosis of the quadrotor aircraft sensor, the altitude direction sensor includes the inertial sensor and the measurement sensor, such as figure 1 , figure 2 , image 3 shown.
[0019] Step 1: Obtain the lift coefficient of the quadrotor lift model through flight experiments
[0020] Lift model for a quadrotor:
[0021]
[0022] In the above formula, f bz is the z-axis acceleration under the machine system, is the lift c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More