

Path planning method for intelligent inspection robot of substation
A patrol robot and path planning technology, which is applied in the direction of instrumentation, non-electric variable control, vehicle position/route/height control, etc., can solve the problem of failing to meet the user's intelligent requirements for the patrol robot, and the patrol robot cannot be dynamic Path planning and other issues to achieve the effect of improving inspection efficiency and intelligence level, optimizing equipment inspection sequence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
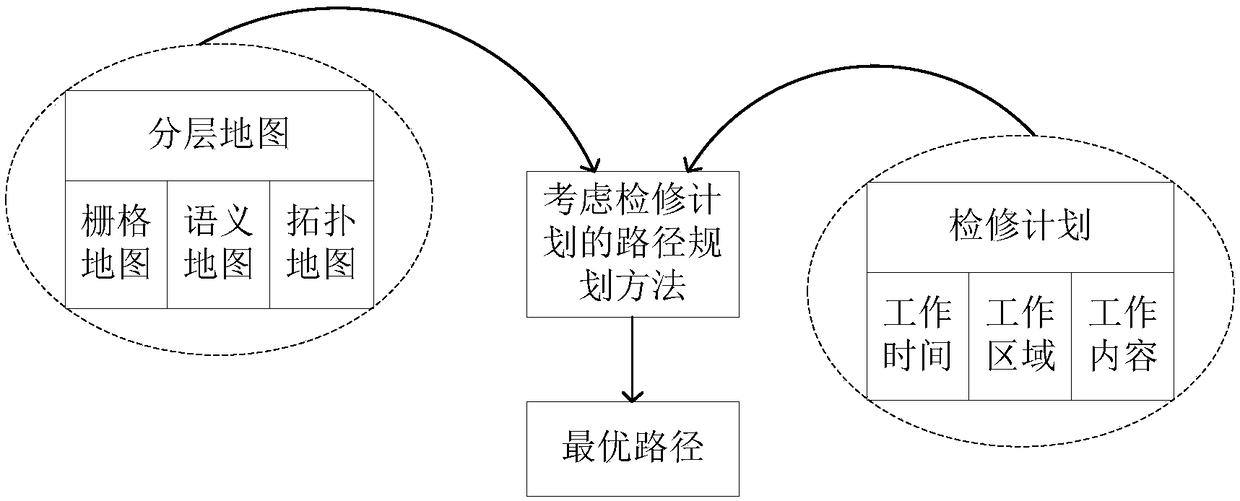
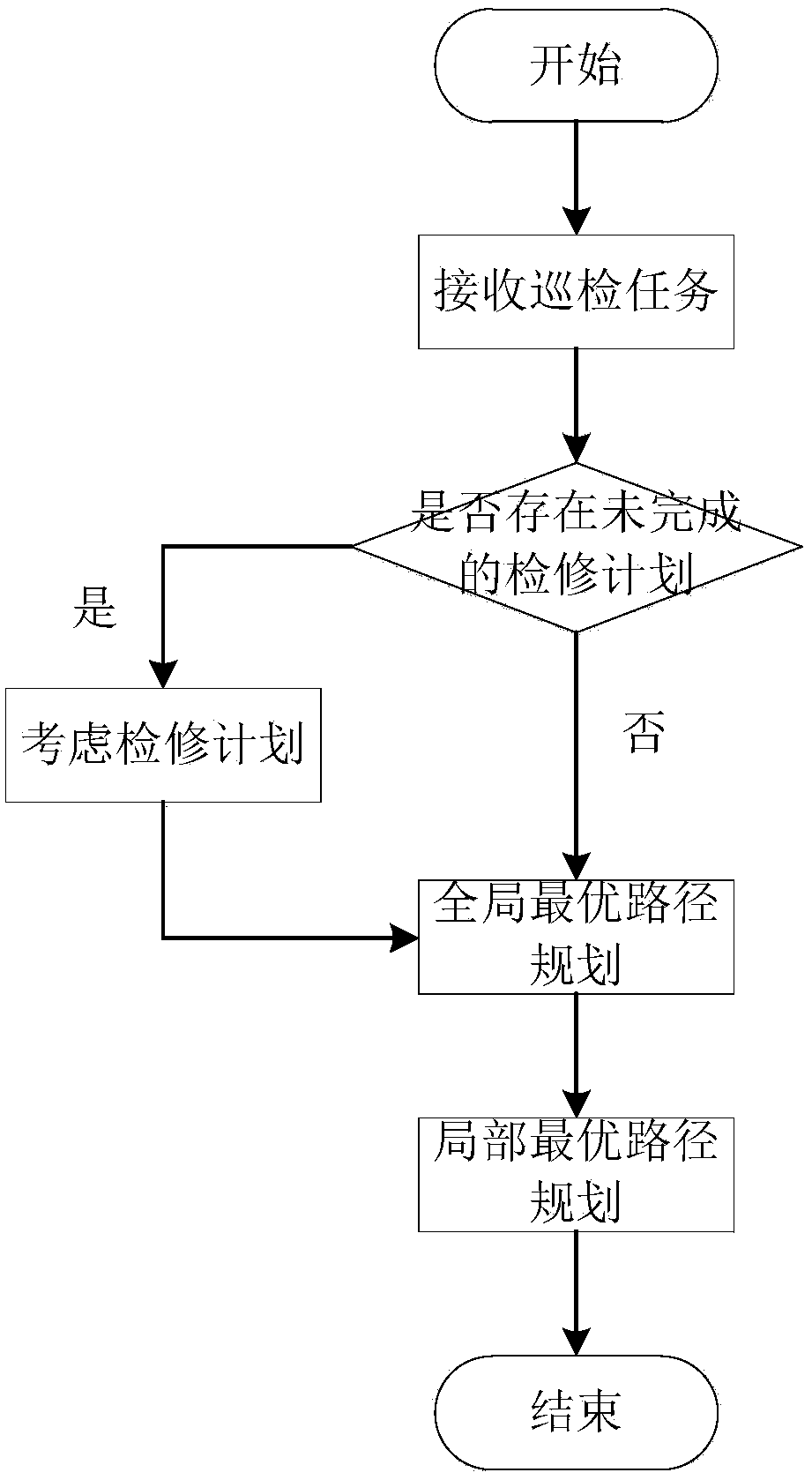
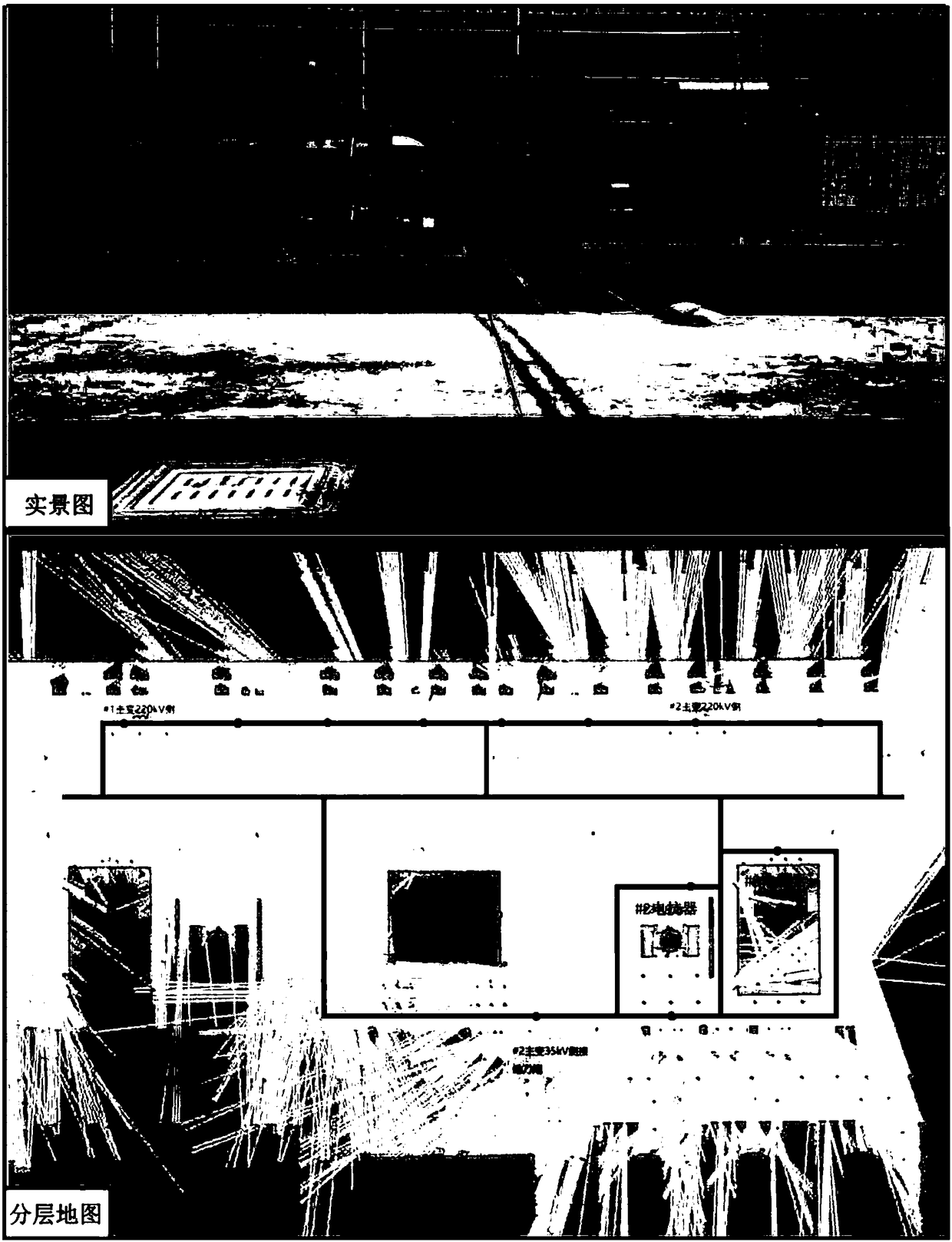
[0042] Such as figure 1 Shown is the principle block diagram of the present invention. On the one hand, it is necessary to create a layered map containing information such as obstacle distribution, inspection object attributes, and inspection path topology; on the other hand, it is necessary to analyze the current maintenance plan and obtain the maintenance plan. Work task information such as working time, work area, work content, etc. The present invention adopts the above two aspects of data, according to figure 2 In the algorithm flow shown, the inspection area is reasonably avoided, the inspection sequence is optimized, and the optimal path is obtained. Specifically include the following...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More