

Self-organizing neural network-based unmanned aerial vehicle mission planning method
A neural network and mission planning technology, applied in biological neural network models, neural architecture, two-dimensional position/channel control, etc., can solve problems such as damage, UAV failure, and model building without considering actual battlefield needs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further explained below in conjunction with the accompanying drawings.
[0063] For the convenience of description, simply define the main variables in the algorithm:
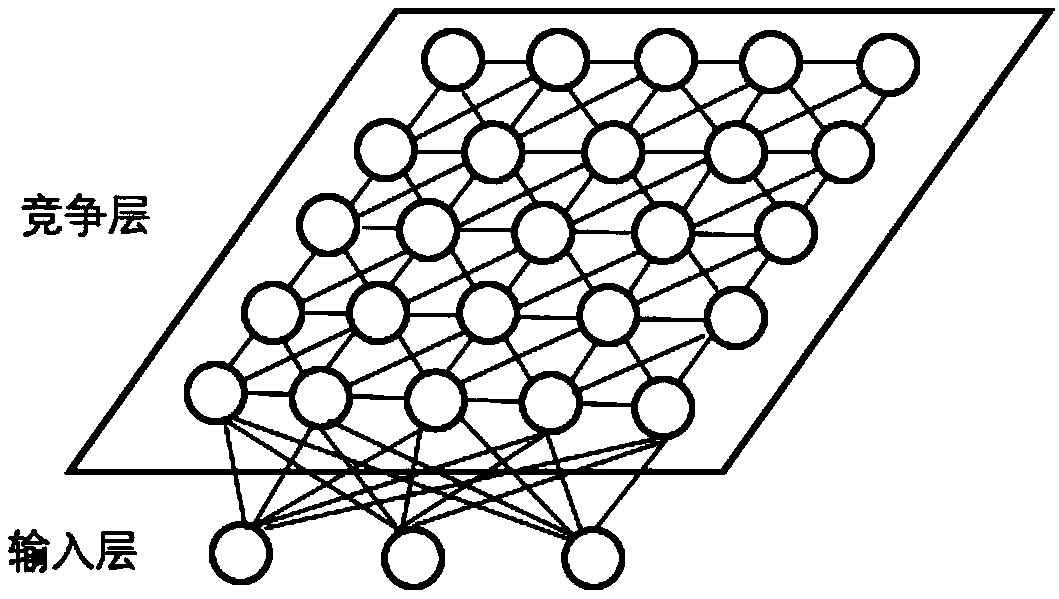
[0064] The task is set as the drone’s attack on targets distributed in different locations. The attack of a drone on a target represents a subtask. The number of task points is m, the number of drones is n, and the number of task points set as {T 1 , T 2 ,...,T m}, the set of drones is {U 1 ,U 2 ,...,U n}, the weapon load carried by each UAV is {C u1 ,C u2 ,...,C un}, the number of weapons that need to be deployed at each mission point is {P T1 ,P T2 ,...,P Tm}, t is the current iteration number of the algorithm, t max Indicates the maximum number of iterations.
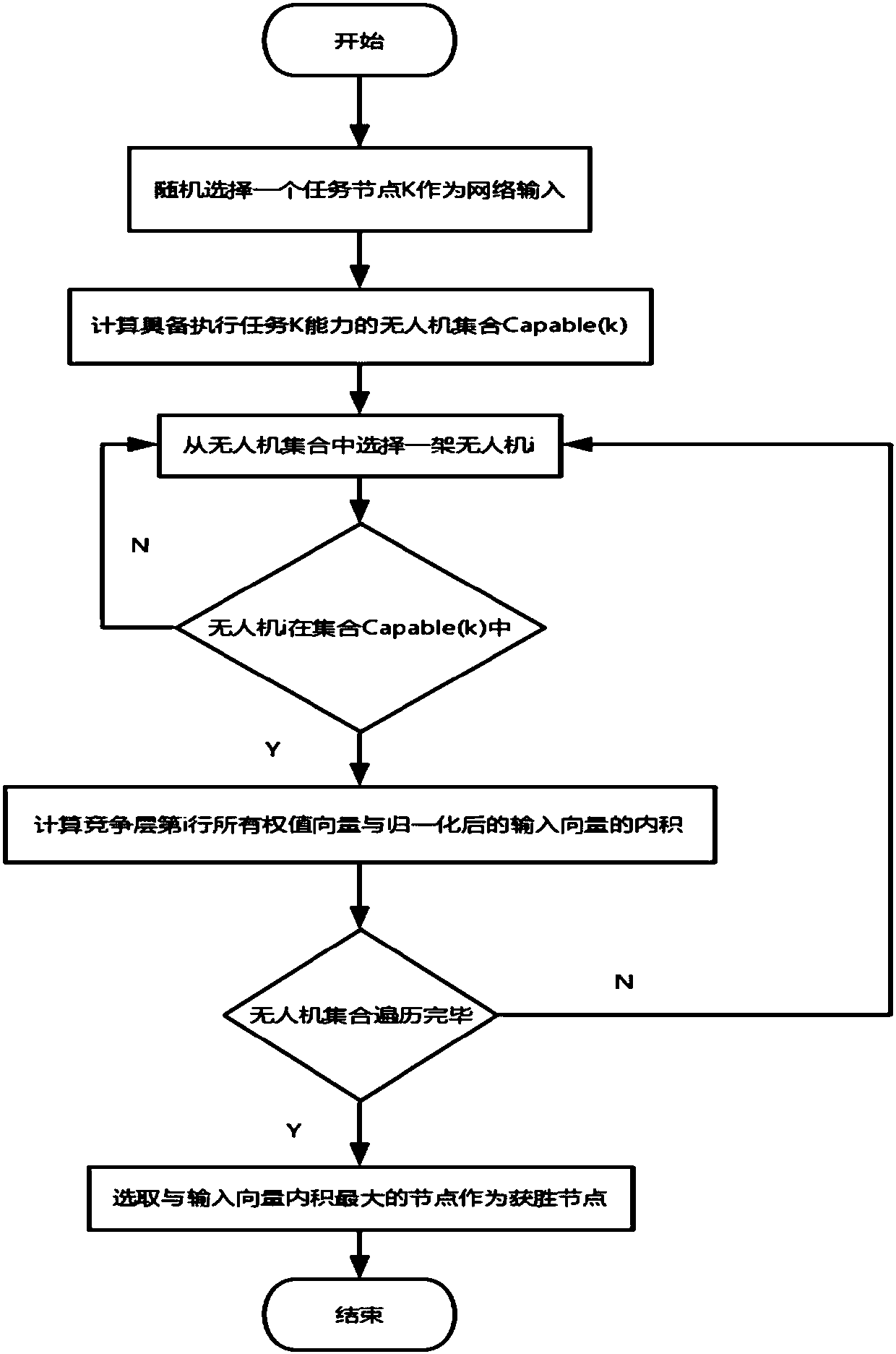
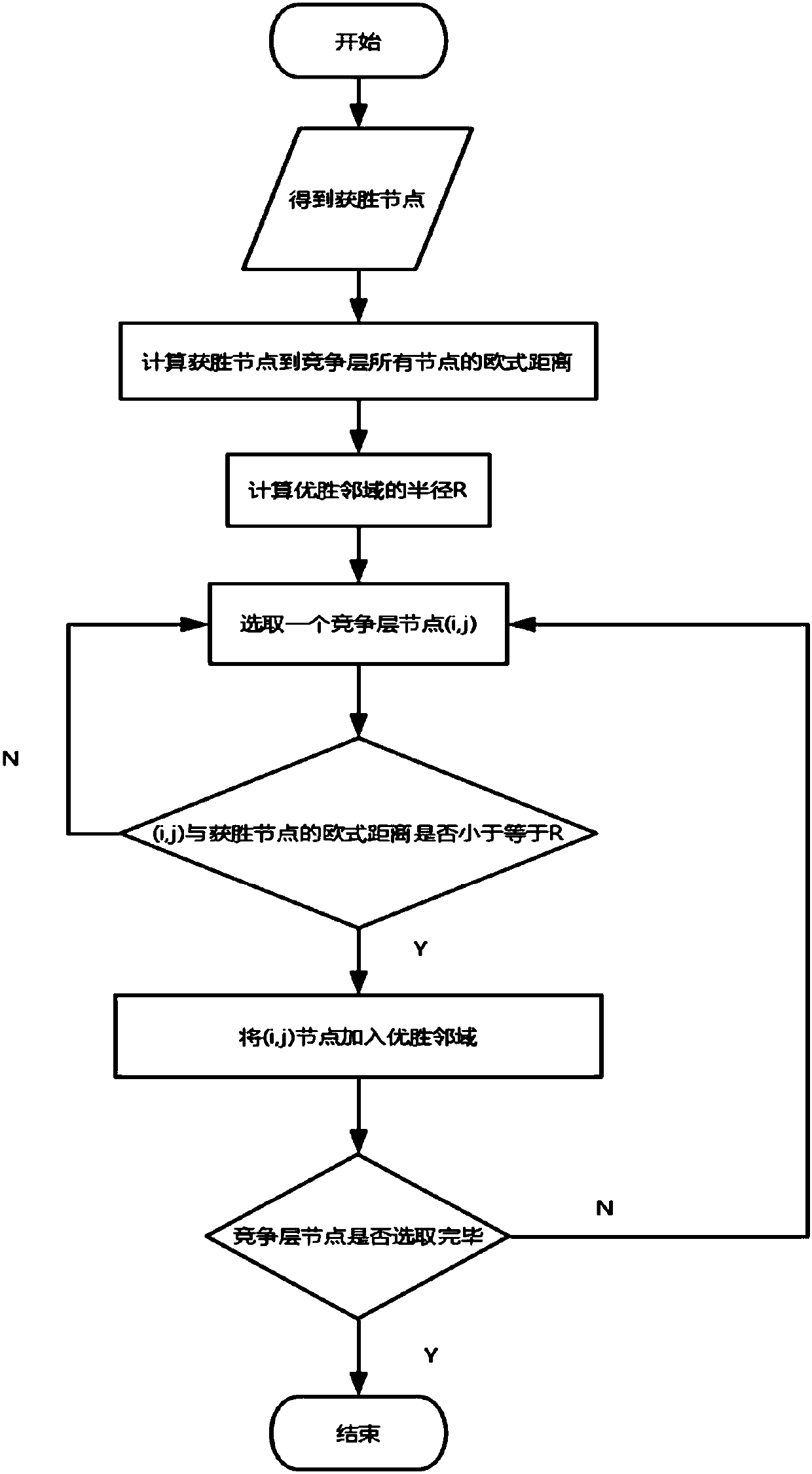
[0065] The present invention proposes a UAV task planning method based on self-organizing neural network, the general flow chart of the algorithm is as follows Figure 4 As shown, it includes the self...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More