

Boundary control method for anti-saturation of flexible Timoshenko beam manipulator
A boundary control, flexible technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as system performance degradation and system instability, achieve precise tracking and control, good anti-saturation control and tracking performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
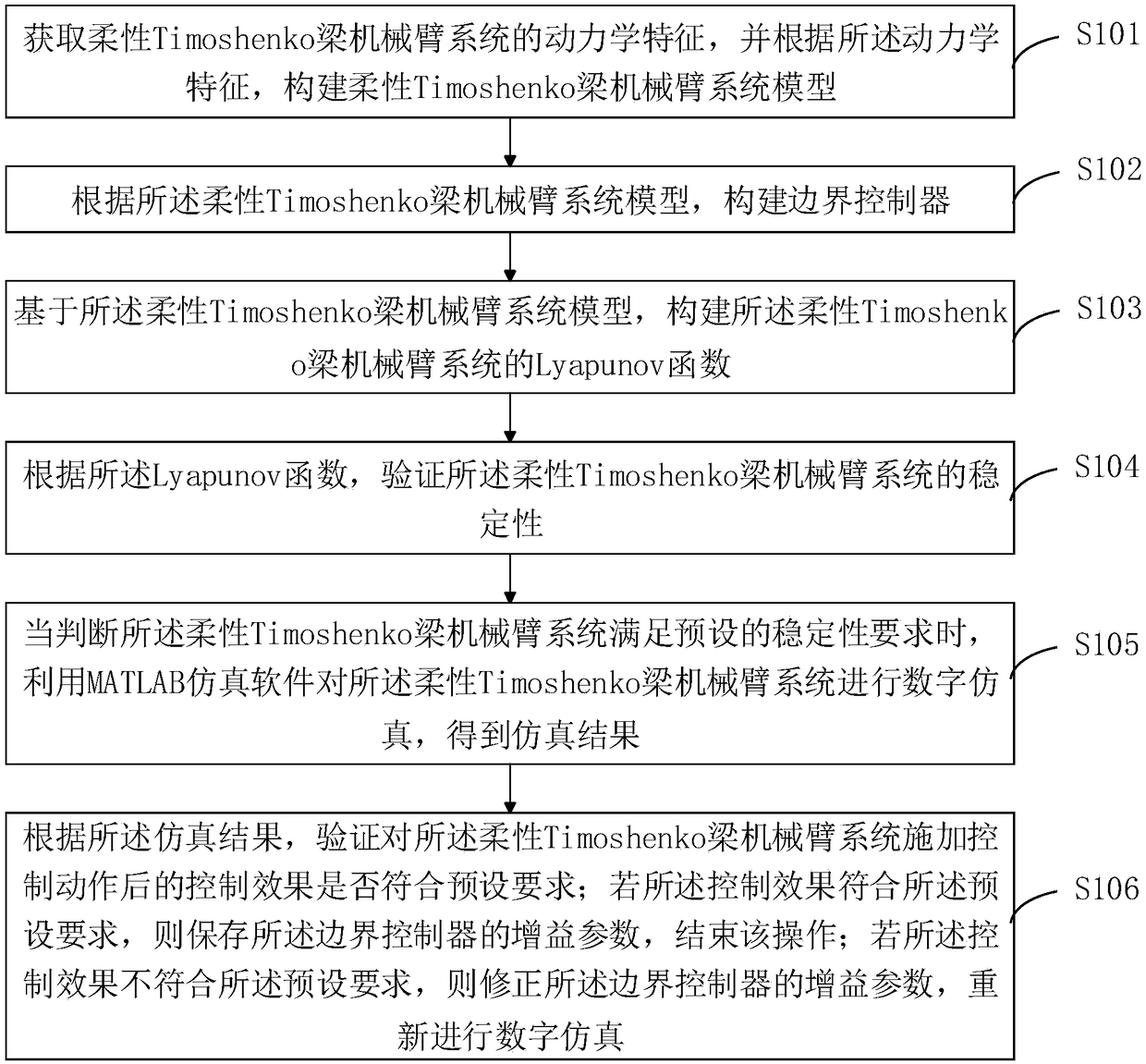
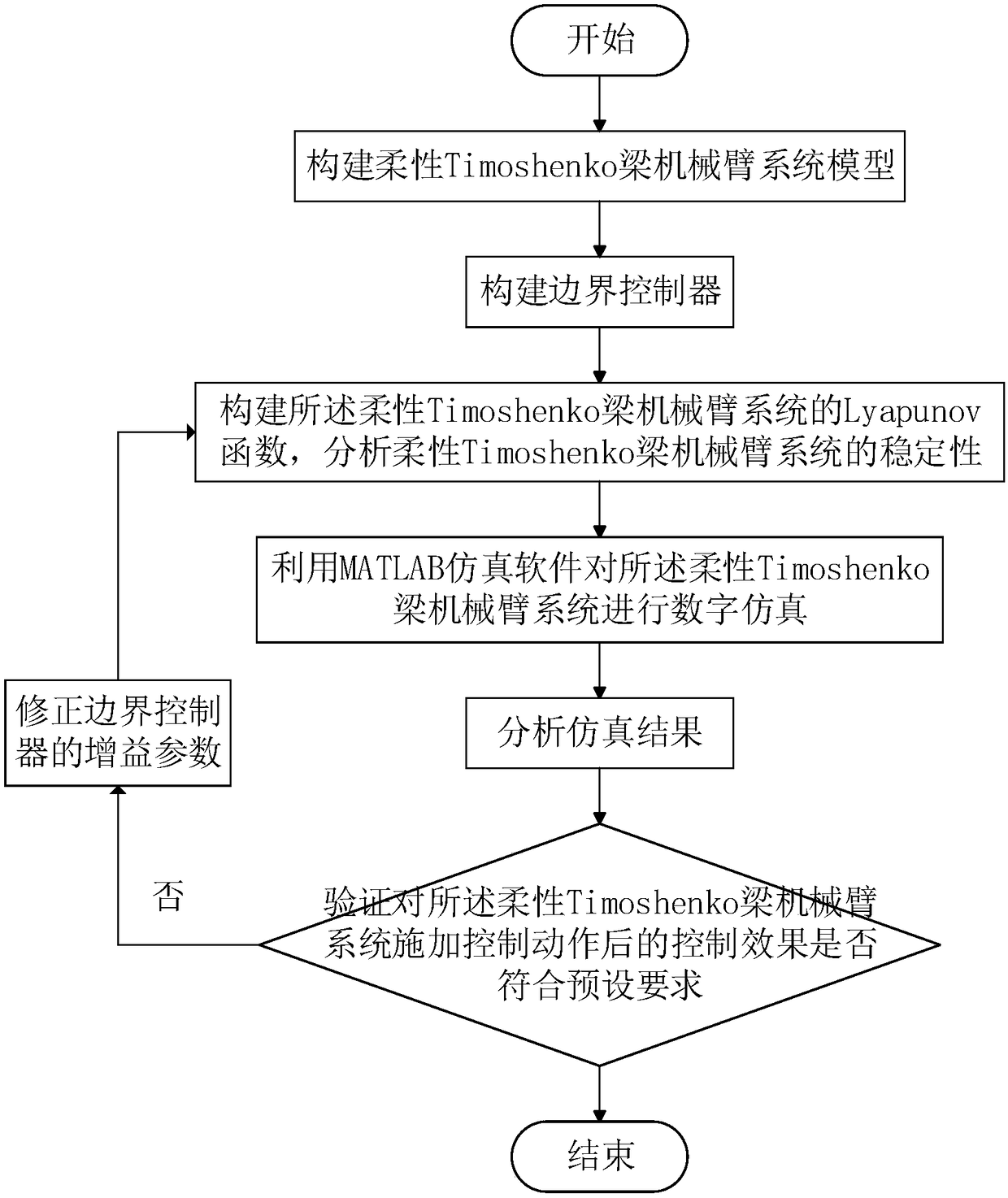
[0070] see figure 1 , figure 1 It is a flow diagram of the boundary control method for the anti-saturation of the flexible Timoshenko beam manipulator provided by the first embodiment of the present invention. The described boundary control method for the anti-saturation of the flexible Timoshenko beam manipulator comprises the following steps:
[0071] S101. Obtain dynamic characteristics of the flexible Timoshenko beam manipulator system, and construct a model of the flexible Timoshenko beam manipulator system according to the dynamic characteristics.
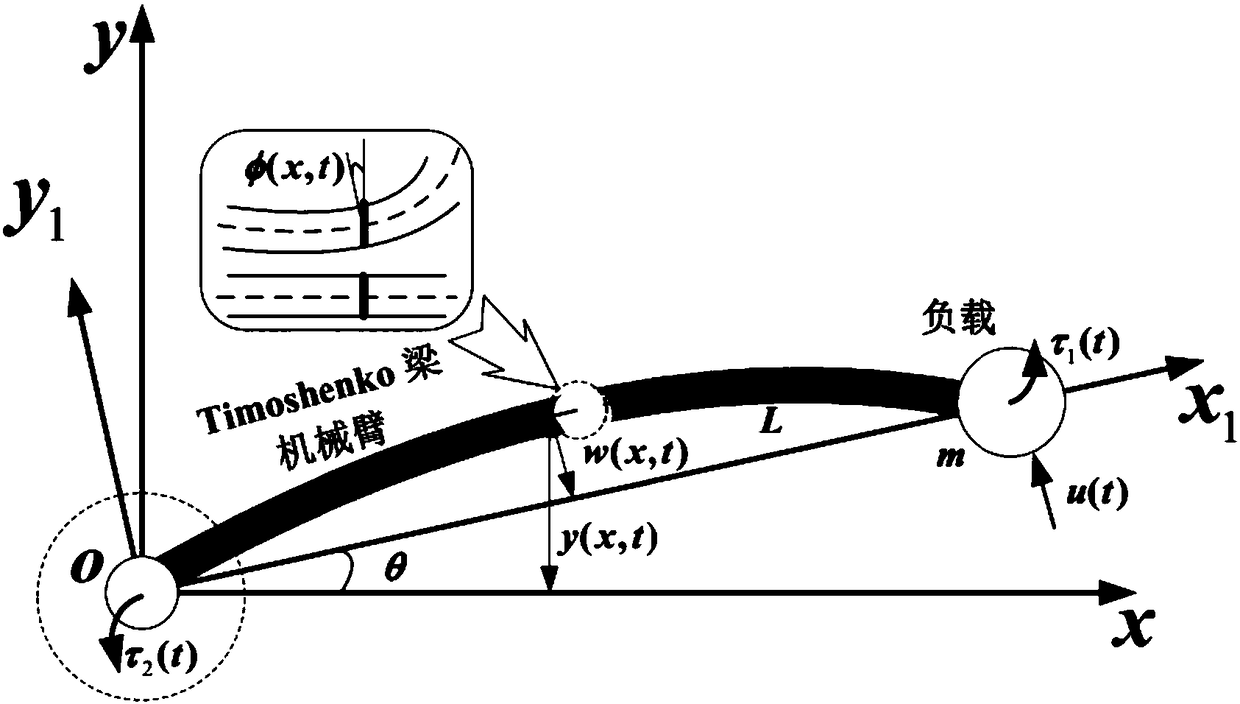
[0072] In this embodiment, the dynamic characteristics include the kinetic energy of the flexible Timoshenko beam manipulator system, the potential energy of the flexible Timoshenko beam manipulator system, and the virtual work done by non-conservative forces on the flexible Timoshenko beam manipulator system . in,
[0073] The kinetic energy is:
[0074]
[0075] Among them, x∈[0,L] is the position of the flexible Ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More