

Dynamic programming optimal control method for dual-motor loads with unknown model
An optimal control and dynamic programming technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as few research results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in detail below with reference to the accompanying drawings and examples.
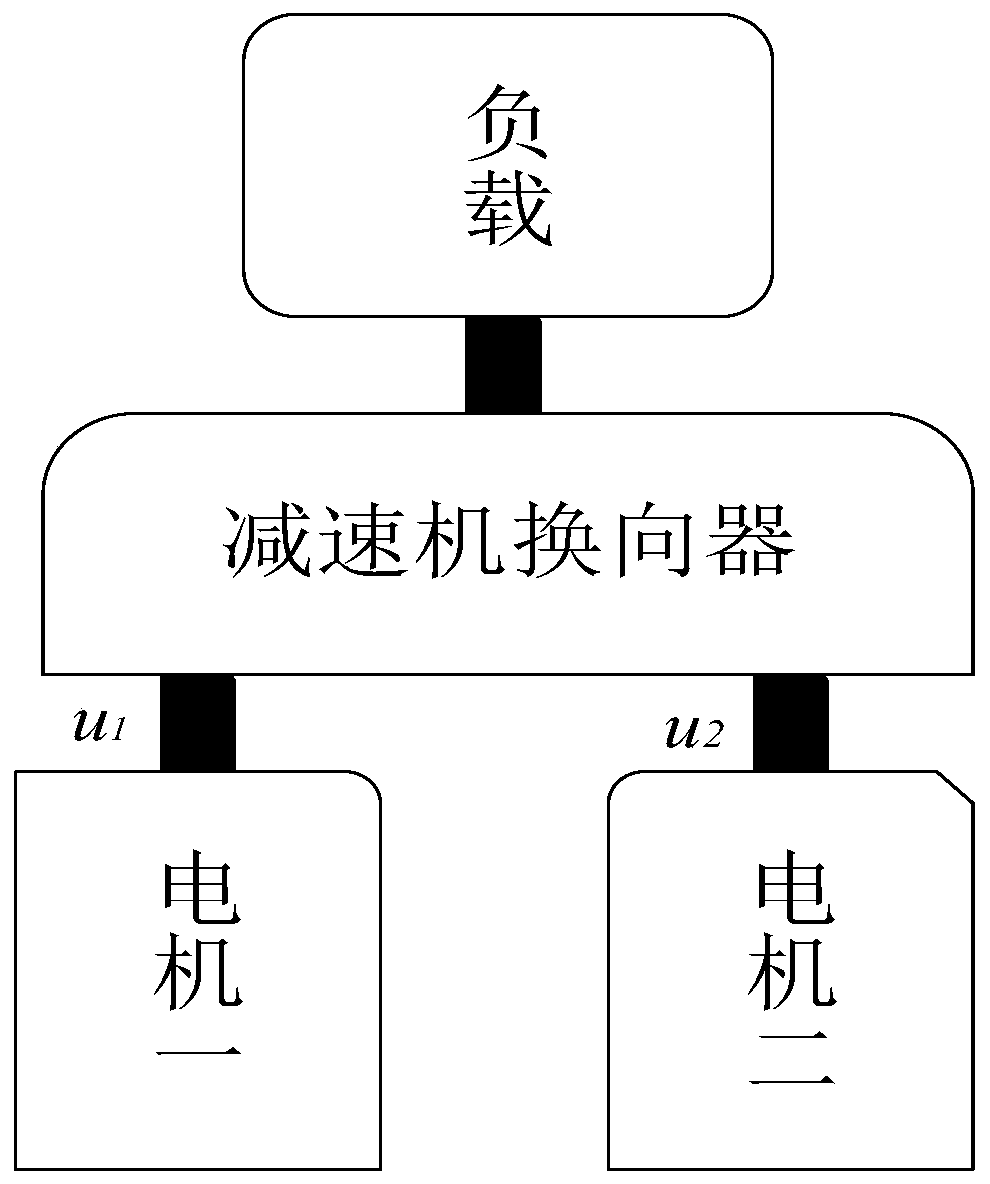
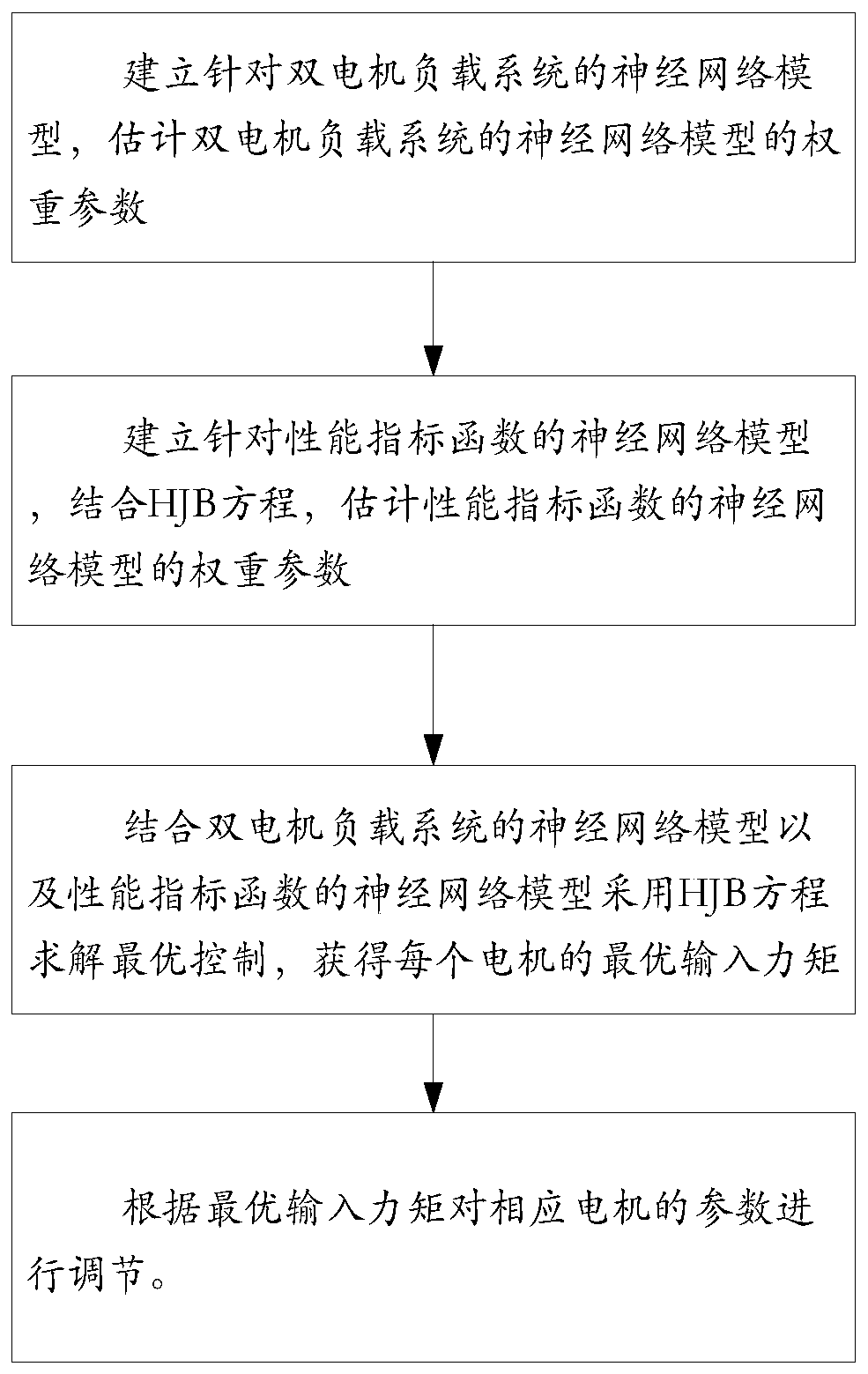
[0066] Please refer to figure 1 and figure 2 , figure 1 A structural block diagram of a dual-motor load system targeted by the embodiment of the present invention is shown. figure 2 It shows the dynamic programming optimal control method of the model-unknown dual-motor load provided by the embodiment of the present invention, including the following steps:
[0067] S1. Establish a neural network model for the dual-motor load system, and estimate weight parameters of the neural network model for the dual-motor load system.
[0068] S2. Establishing a neural network model for the performance index function, and estimating the weight parameters of the neural network model for the performance index function in combination with the Hamilton-Jacobi-Bellman HJB equation;
[0069] S3, combining the neural network model of the dual-motor load system and the n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More