

Method using second order gradient information to improve artificial physical obstacle avoidance trajectory smoothness
A second-order gradient and trajectory smoothing technology, applied in the field of robotics, can solve the problems of increasing task execution time and energy consumption, and achieve the effect of less time consumption, less control parameters, and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
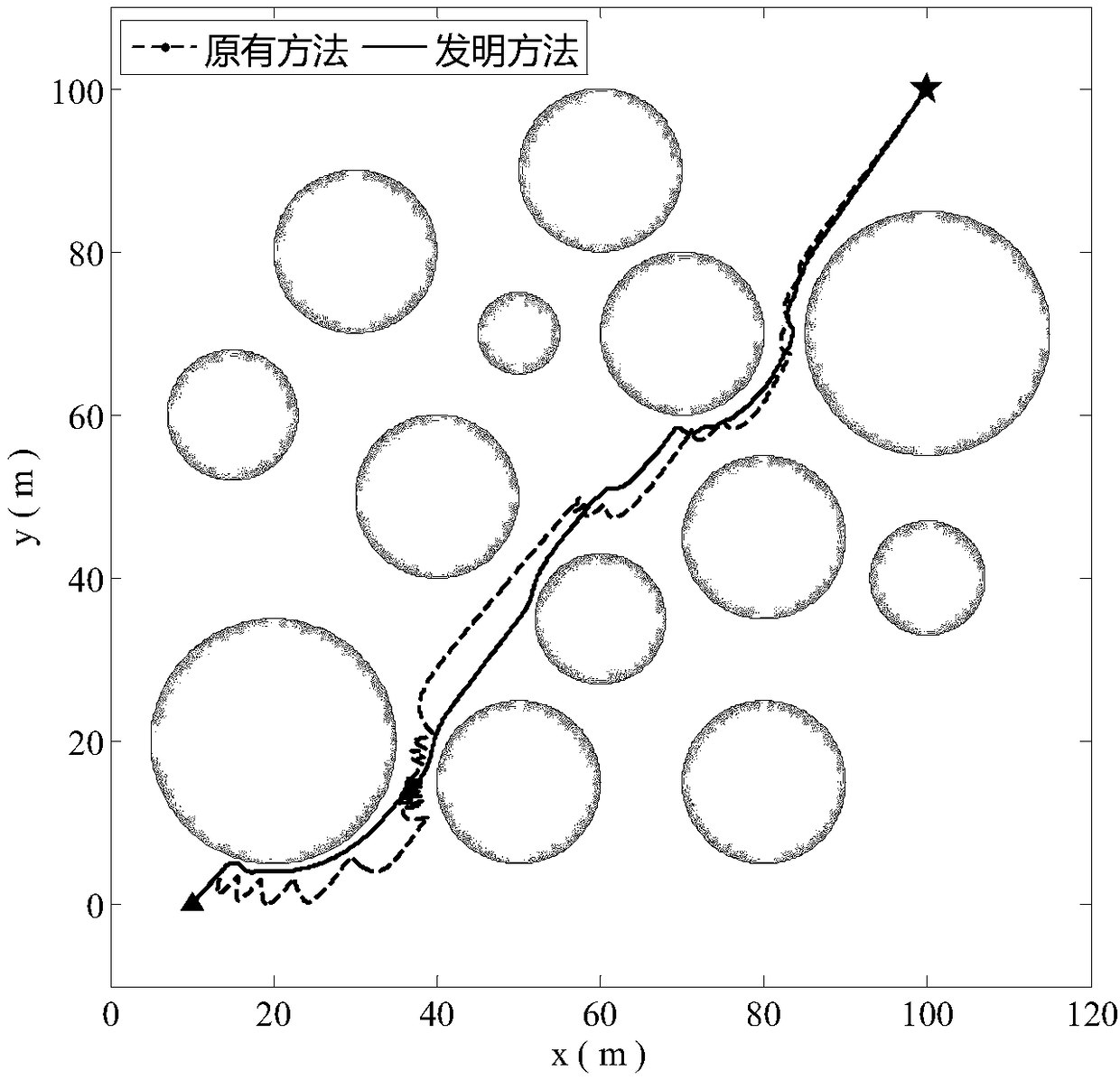
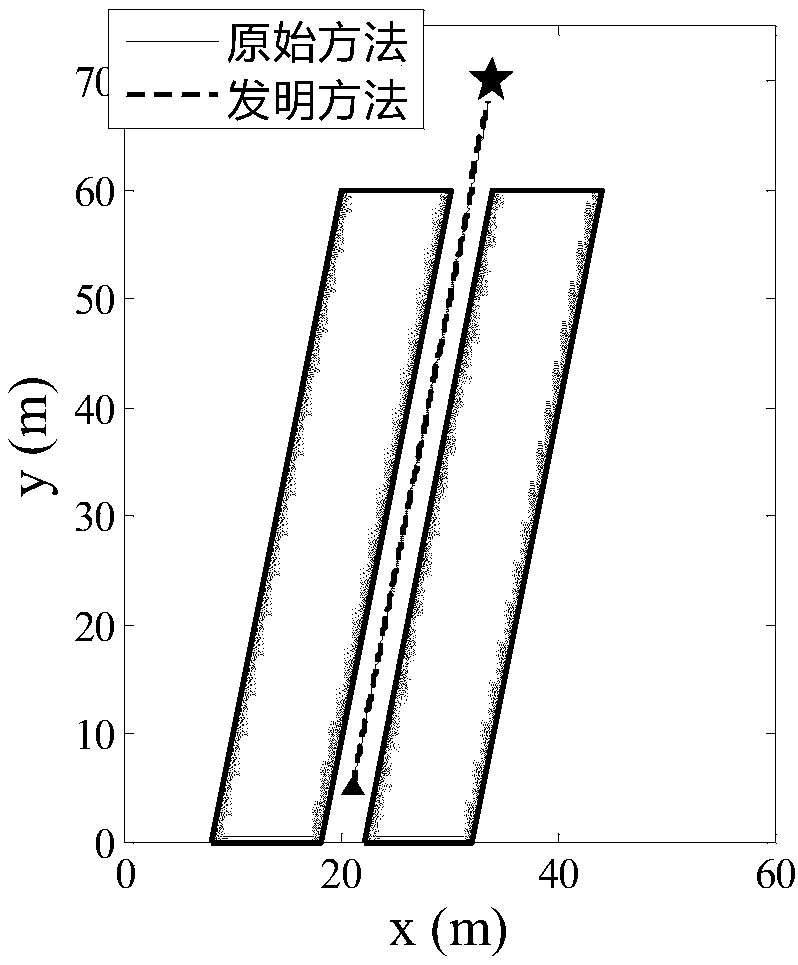
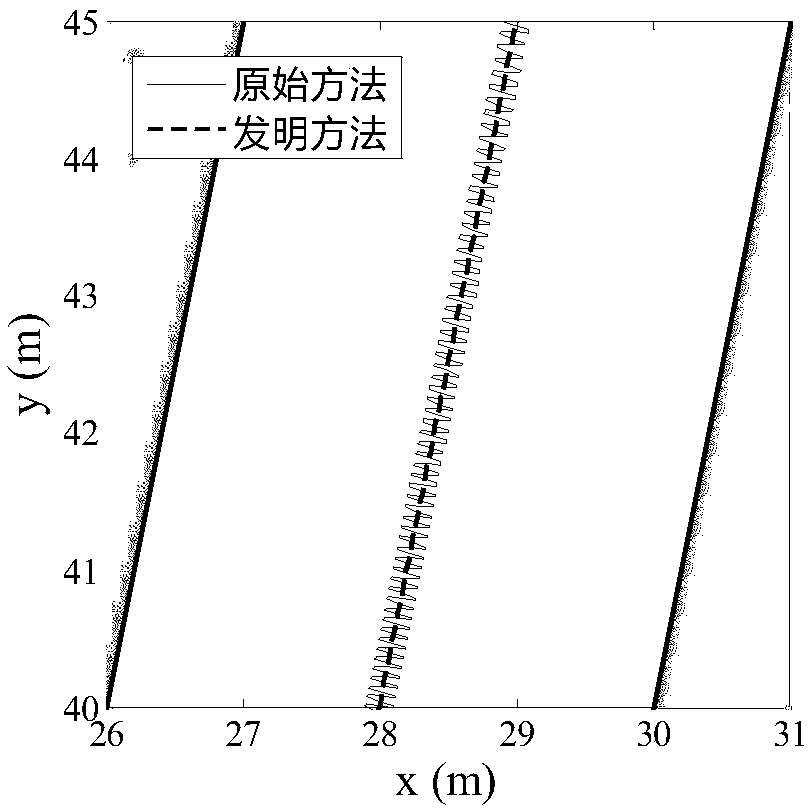
[0052] The following describes the implementation of the method for improving the smoothness of the artificial physical obstacle avoidance trajectory proposed by the present invention by using the second-order gradient information through specific examples, and verifies the performance of the method proposed by the present invention. The calculation software used in the example is MATLAB2009a, and the detailed implementation steps are as follows (the length units in the steps are all m).
[0053] Determine the robot's initial coordinates p robot (0)=(10,0) and target point coordinates p goal =(100,100), the maximum moving speed of the robot v max =1m / s, the gravitational constant G of the target point goal =1000, range of obstacle repulsion force R rep =2, barrier rejection coefficient G obs =100, virtual coefficient of friction f=0.2. Two calculation examples are set here: in calculation example 1, some circular obstacles are randomly arranged in a square space of 120m×1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More