

AGV (automated guide vehicle) path planning method based on A* algorithm
A path planning and algorithm technology, applied in the direction of navigation computing tools, etc., can solve the problems of increasing computer resource memory consumption, which is not conducive to production efficiency, etc., and achieve the effect of reducing data storage, reducing computing redundancy, and simplifying environmental modeling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
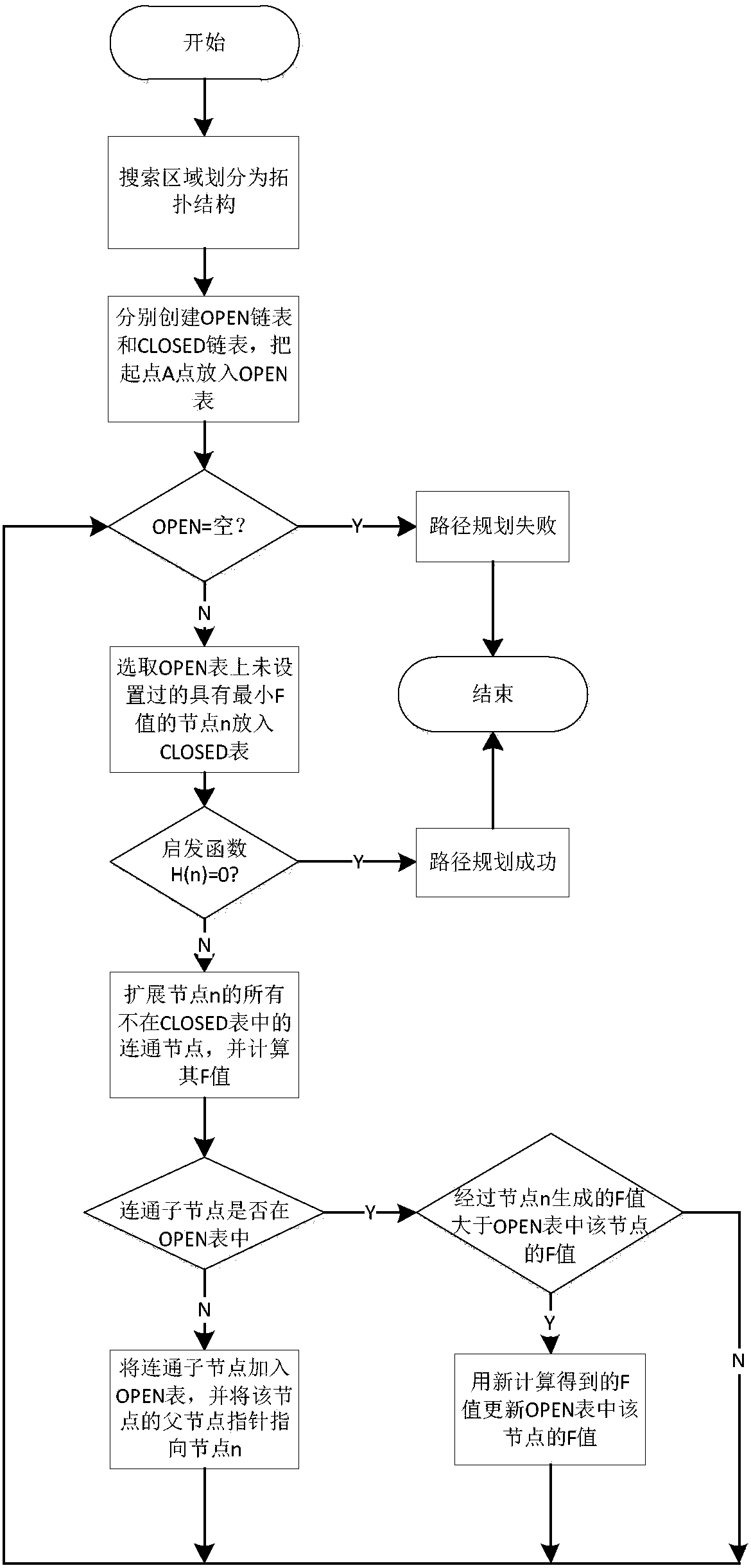
Method used
Image

Examples
Embodiment 1
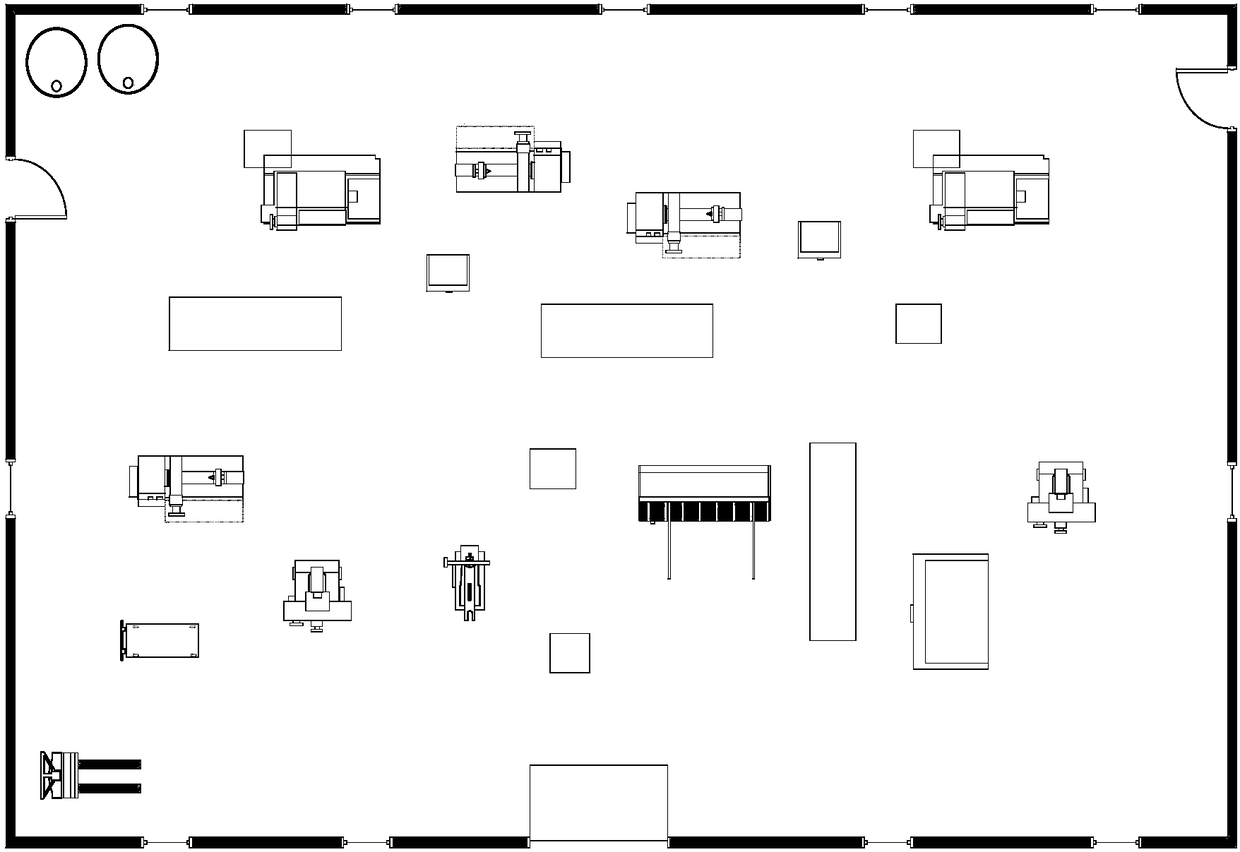
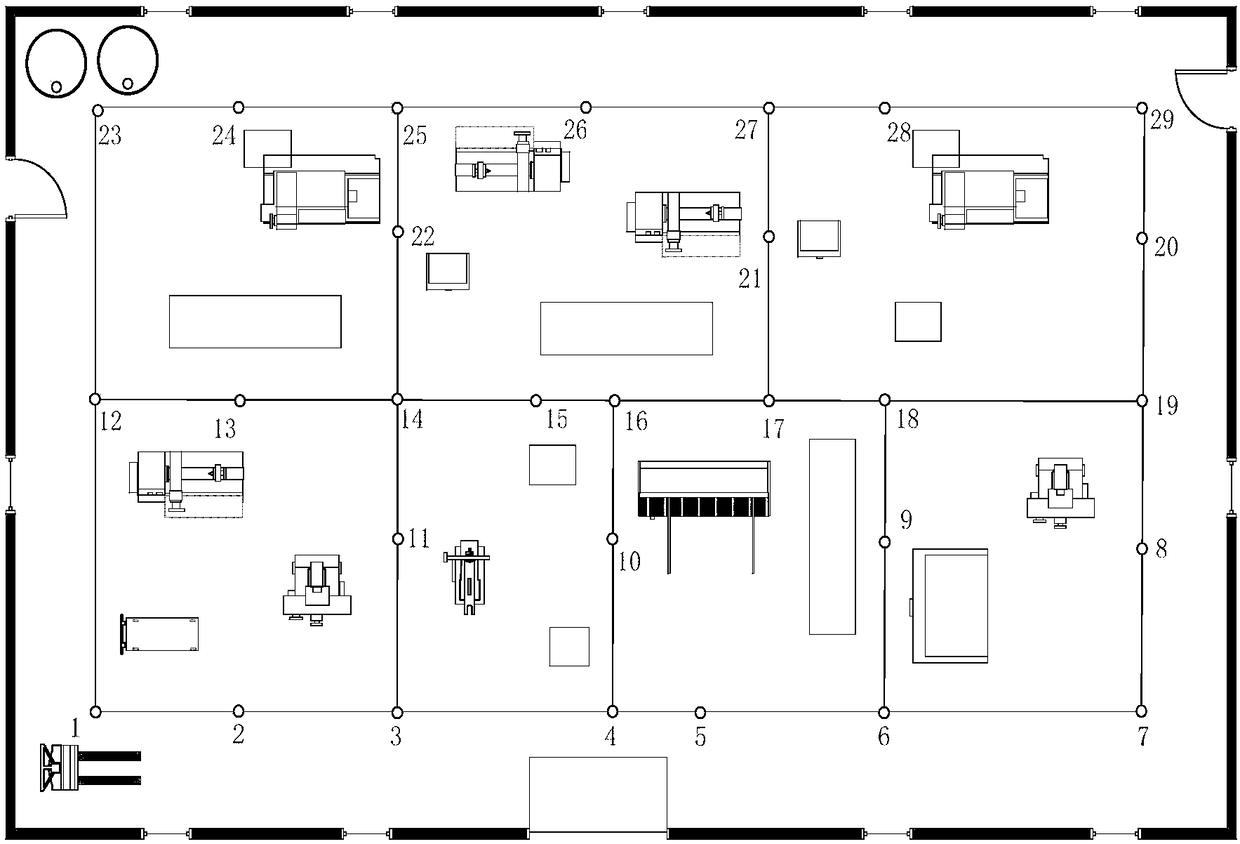
[0037] figure 2 It is a floor plan of environmental equipment in a factory workshop, image 3 Model the floor plan for the shop floor topology. There are 29 node stations set up in the workshop of the factory for the AGV delivery task stops. The nodes are connected if there is a connection between them, and the AGV can only drive on the connected road section. Node 1 is set as the starting point A of the task, and the end point is node 27, and the method of the present invention is used for AGV path planning.
[0038] Output the optimal path at the end of the algorithm process, Figure 4 The bold solid line in the center represents the path generated by the planning algorithm of the present invention. Compared with the dotted line path generated by the traditional A* algorithm using the grid method, it is obvious that the method of the present invention outputs a smoother, safer and more reliable path. The path is relatively rough and requires a lot of calculation, so it c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More