

Robot polishing method and system based on visual inspection
A visual inspection and robot technology, applied in the field of workpiece processing, can solve the problems of long production time, only suitable for mass production, and cumbersome inspection steps, etc., to achieve the effect of ensuring the pass rate, ensuring the grinding accuracy, and improving production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
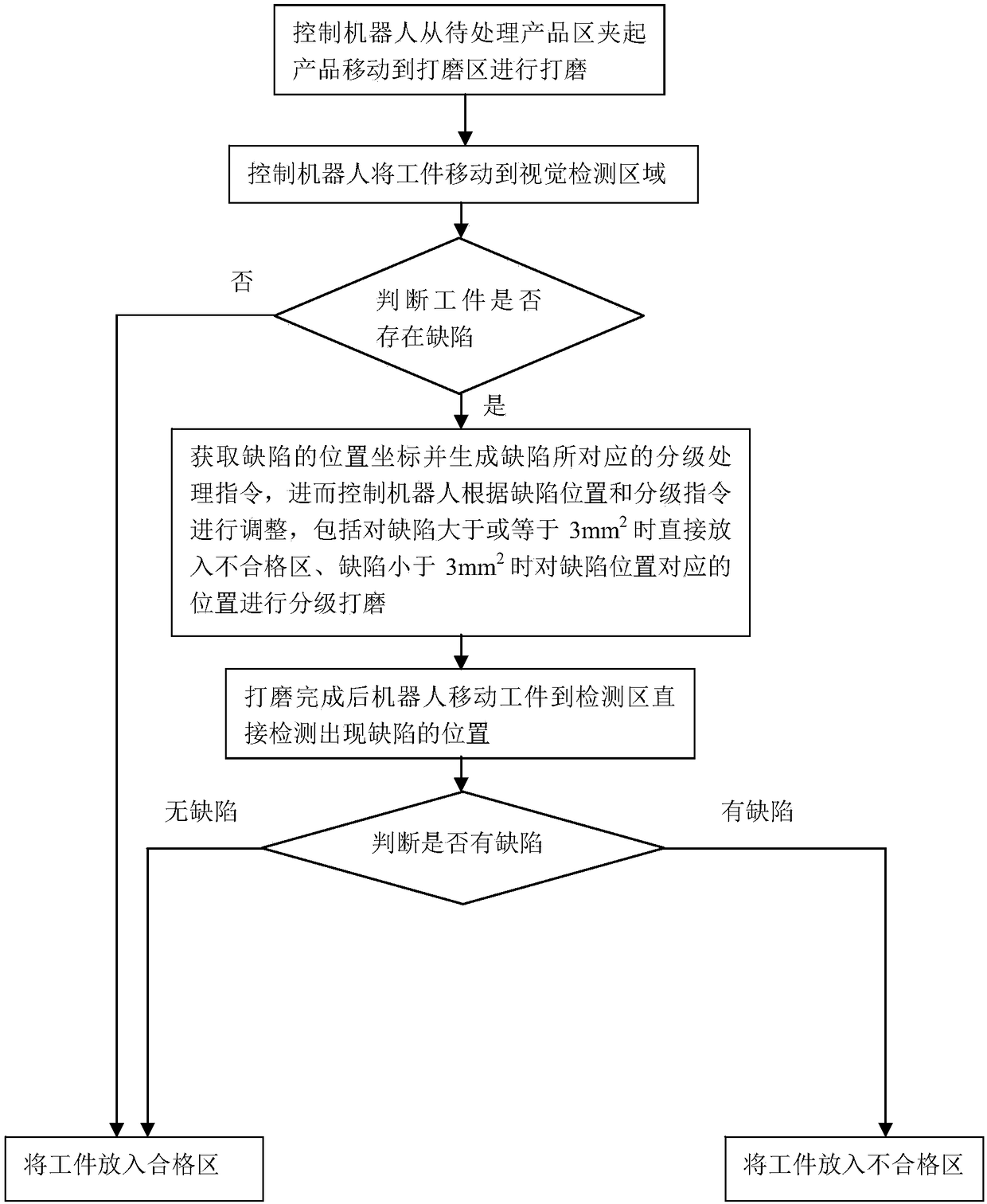
[0061] refer to figure 1 , a method for grinding a robot based on vision detection, comprising the following steps:
[0062] S1. Control the robot to move the workpiece to the grinding area for grinding;
[0063] S2. Control the robot to move the workpiece to the visual inspection area;
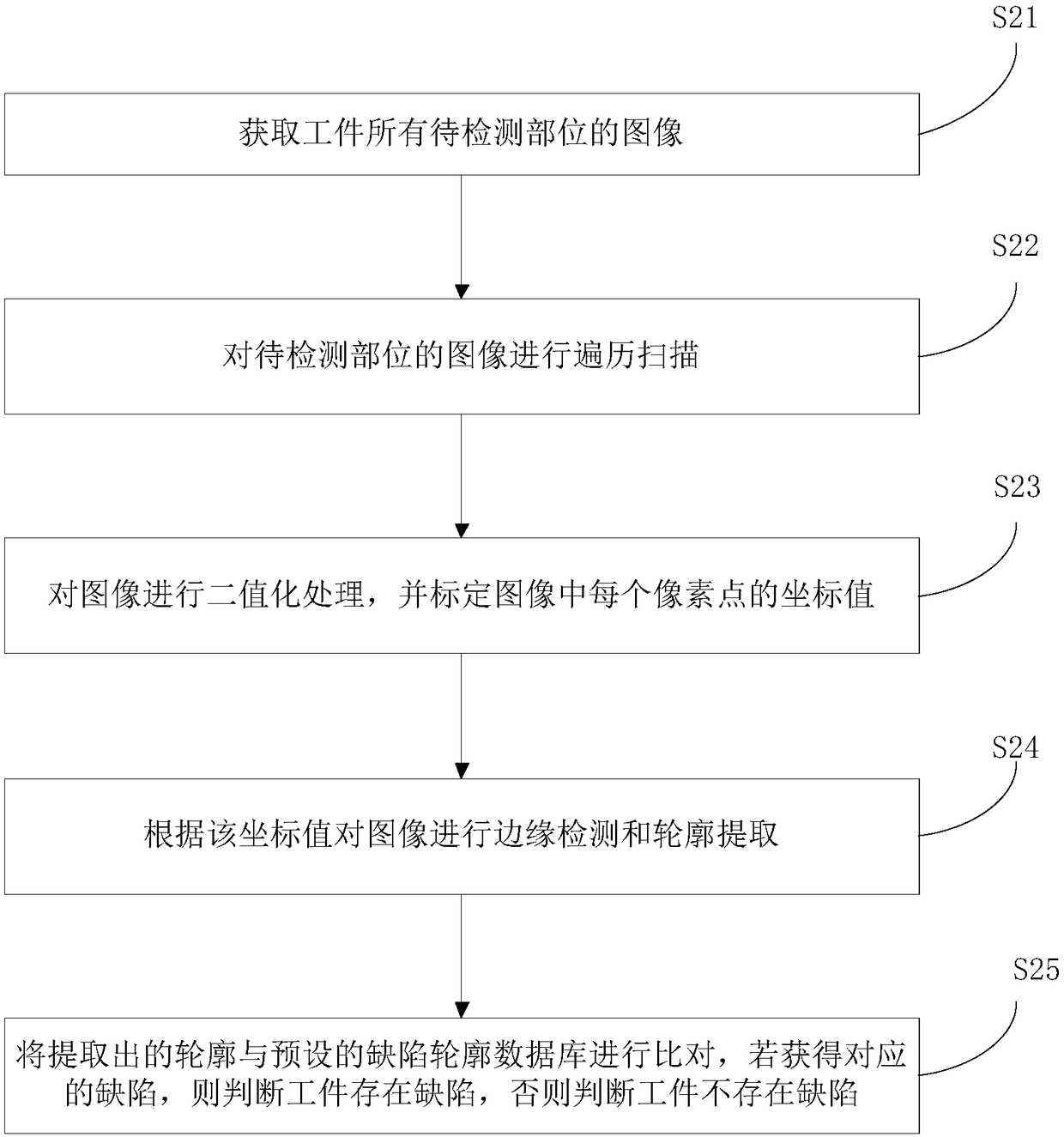
[0064] S3. Control the camera to sequentially collect images of the parts to be detected of the workpiece, obtain images of all parts to be detected of the workpiece and perform image processing, and judge whether the workpiece has defects. If there are no defects, put the workpiece into the qualified product area, and vice versa , execute step S4;
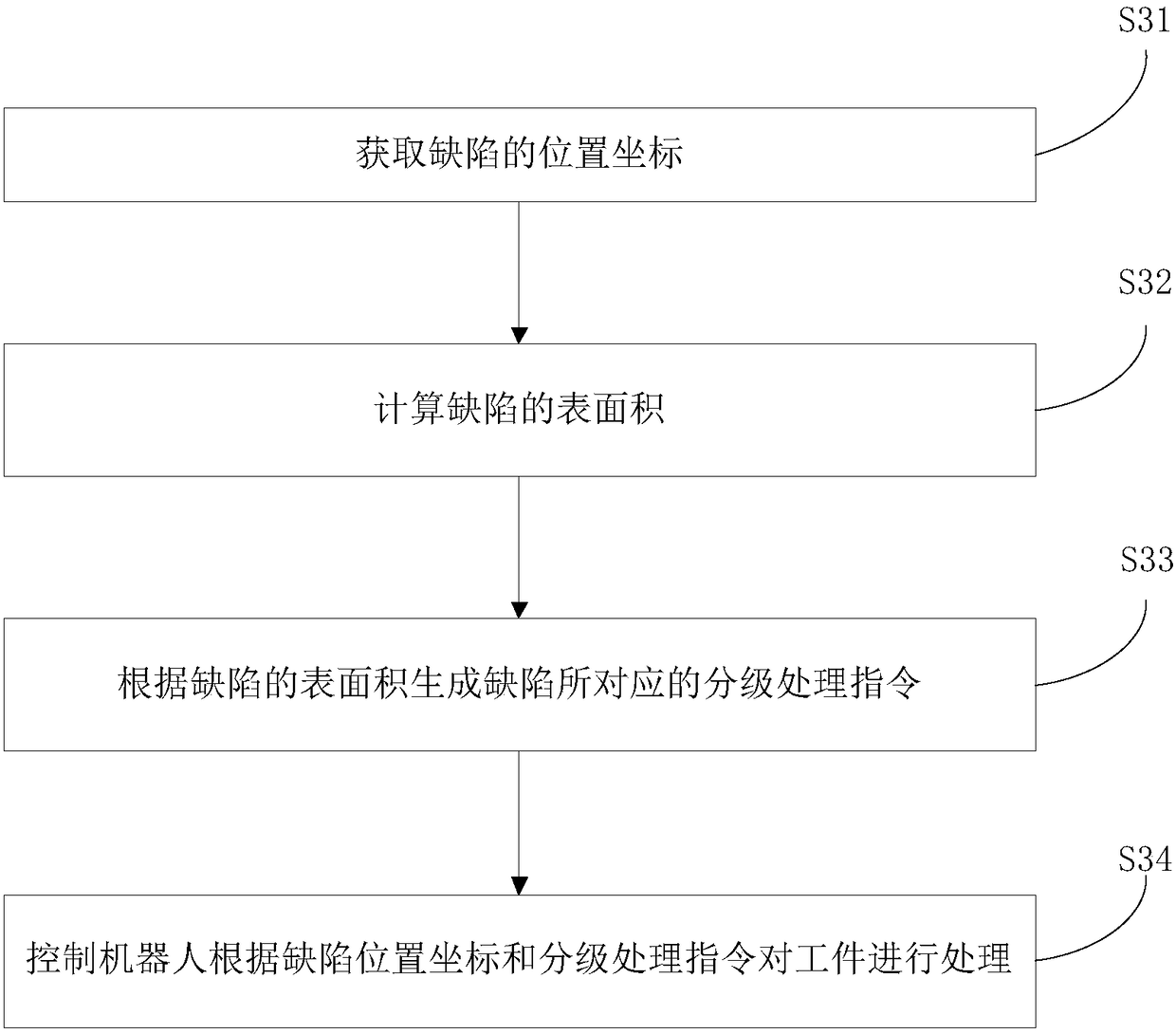
[0065] S4. Obtain the position coordinates of the defect and generate a classification processing instruction corresponding to the defect, and then control the robot to perform classification grinding processing on the workpiece according to the defect position coordinates and the classification processing instruction;
[0066] S5. Collect ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More