

A Method for Robot Trajectory Tracking
A trajectory tracking and robot technology, which is applied in the directions of instruments, adaptive control, control/regulation systems, etc., can solve the problems of not considering the motion range of the robot, the robot is difficult to achieve the control effect, etc., and achieve the effect of accurate trajectory tracking control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
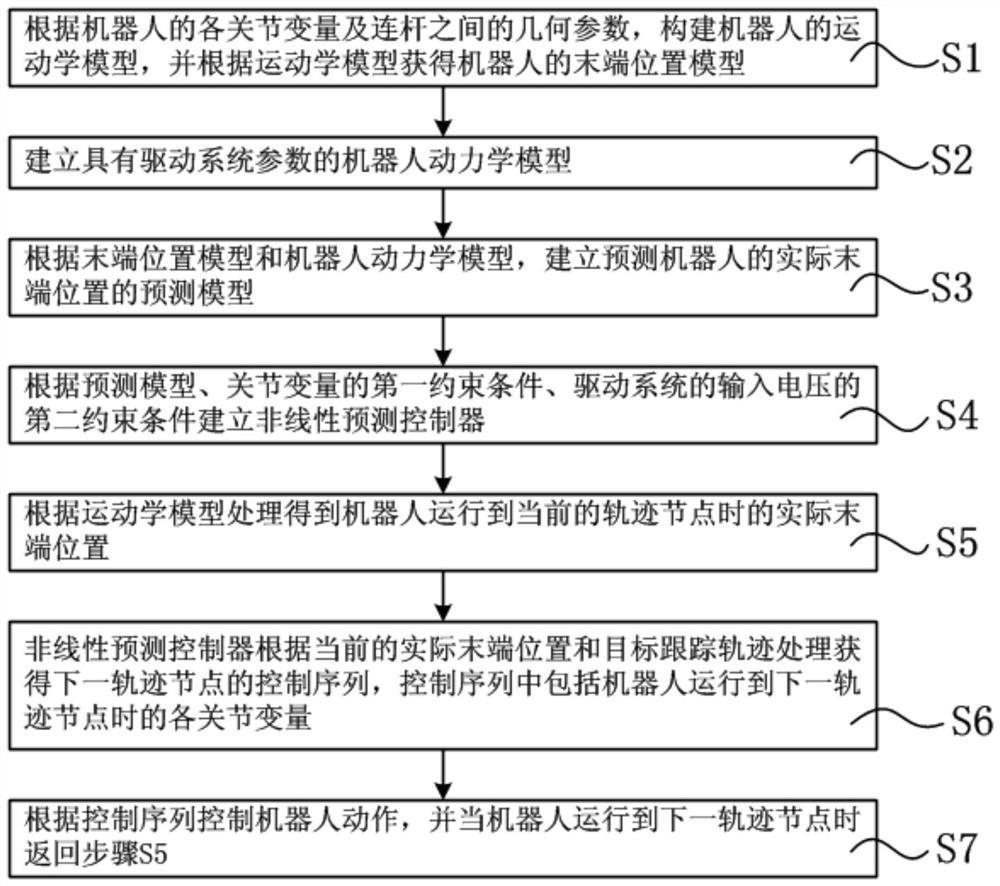
[0047] In a preferred embodiment of the present invention, as Figure 1-3 As shown, a robot trajectory tracking method is provided, the robot is controlled by a drive system to run in an actual running trajectory, and the actual running trajectory includes a plurality of trajectory nodes, such as figure 1 shown, including the following steps:
[0048] The target tracking trajectory of the robot is preset, and the target tracking trajectory includes a plurality of tracking trajectory nodes;
[0049] Step S1. Construct the kinematics model of the robot according to the joint variables of the robot and the geometric parameters between the connecting rods, and obtain the end position model of the robot according to the kinematics model;
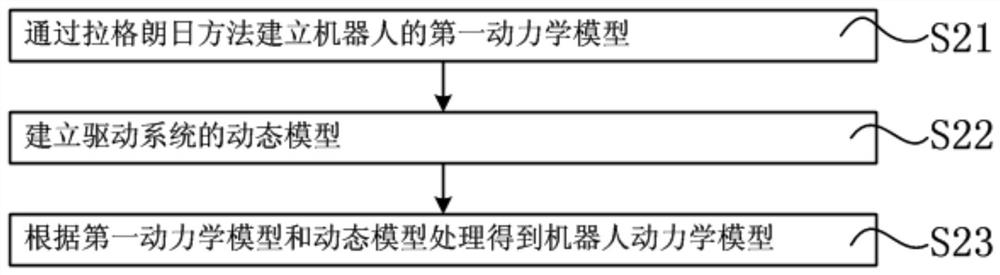
[0050] Step S2, establishing a robot dynamics model with dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More