

Method for controlling networked teleoperation system in consideration of limited system performance
A technology of operating system and system performance, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0087] The present invention will be further described below in conjunction with accompanying drawing:
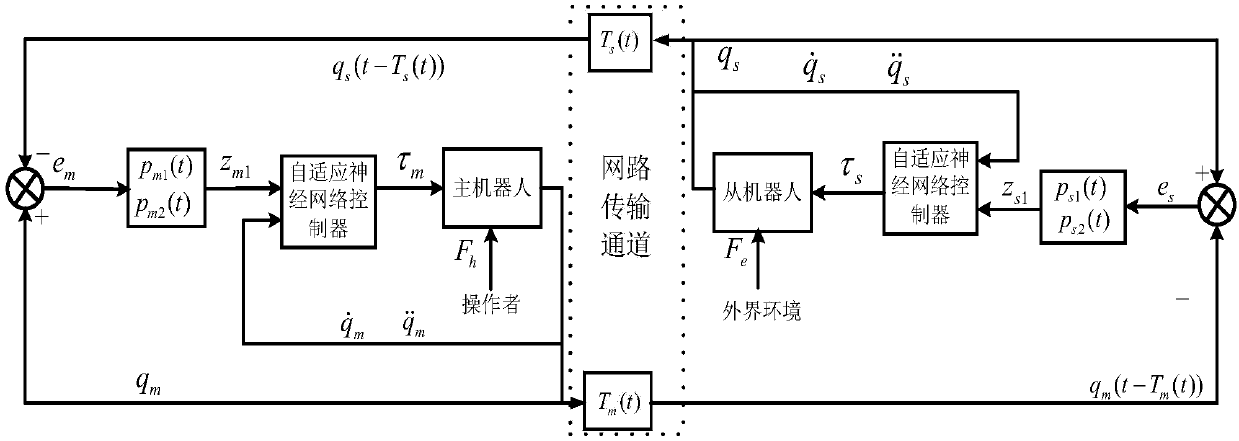
[0088] like Figure 1-3 Shown, method of the present invention comprises the following steps:
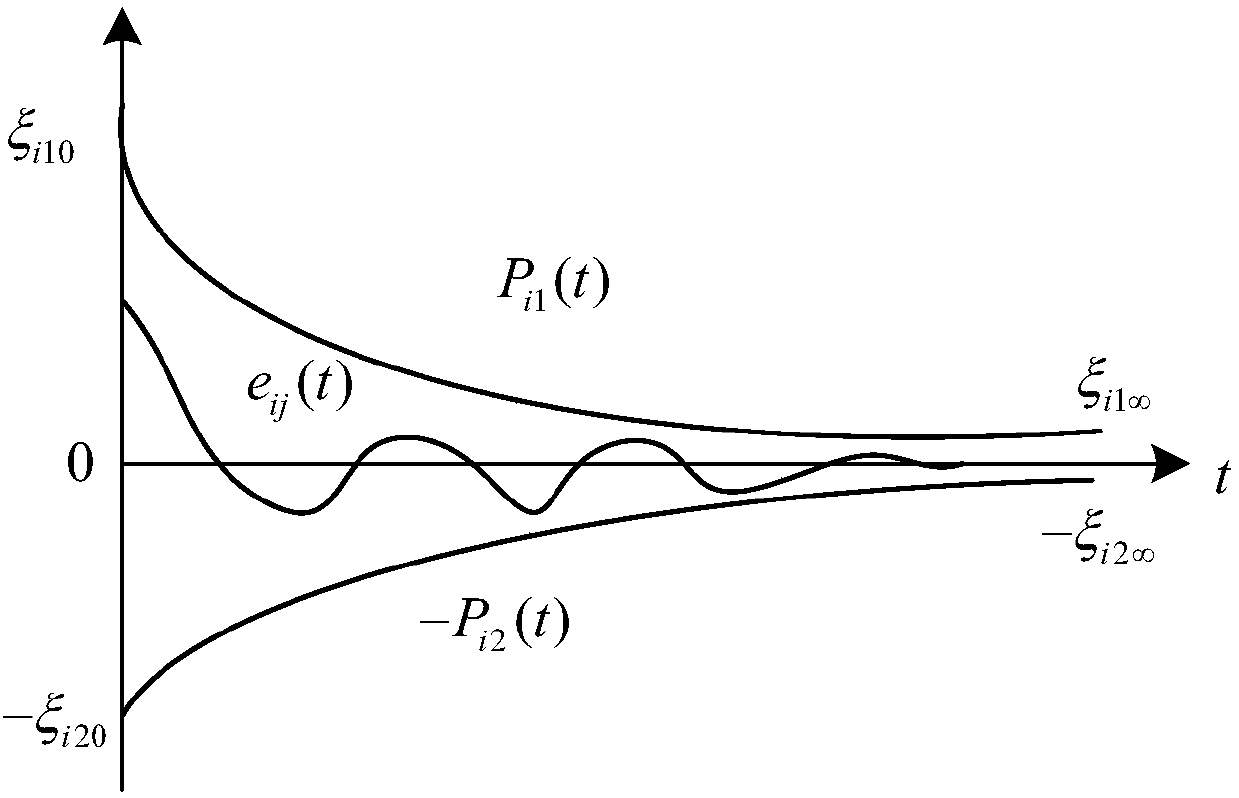
[0089] Step 1, define the master and slave position synchronization error limited variables based on the nonlinear networked teleoperation system model under the network communication delay;
[0090] Considering a teleoperation system composed of two nonlinear robot systems, according to the commonly used robot Lagrangian dynamics model, a teleoperation dynamics model based on joint space can be obtained
[0091]
[0092] Among them, q m ,q s ∈ R n is the joint displacement matrix; is the joint velocity matrix; M m (q m ), M s (q s )∈Rn×n is the positive definite inertia matrix of the system; is the vector of Coriolis force and centrifugal force; G m (q m ),G s (q s )∈R n is the moment of gravity; is the unknown friction force and bounded external disturbanc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More