

Method for realizing semantic SLAM system based on mobile terminal
A system implementation and mobile terminal technology, applied in image data processing, instruments, character and pattern recognition, etc., can solve problems such as relatively demanding hardware computing capabilities, difficulty in handling mobile devices, scale and precision drift, etc., and achieve wide application value and Scalability, low cost, good performance results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
[0042] 1. Basic concepts
[0043] (1) Semantic SLAM
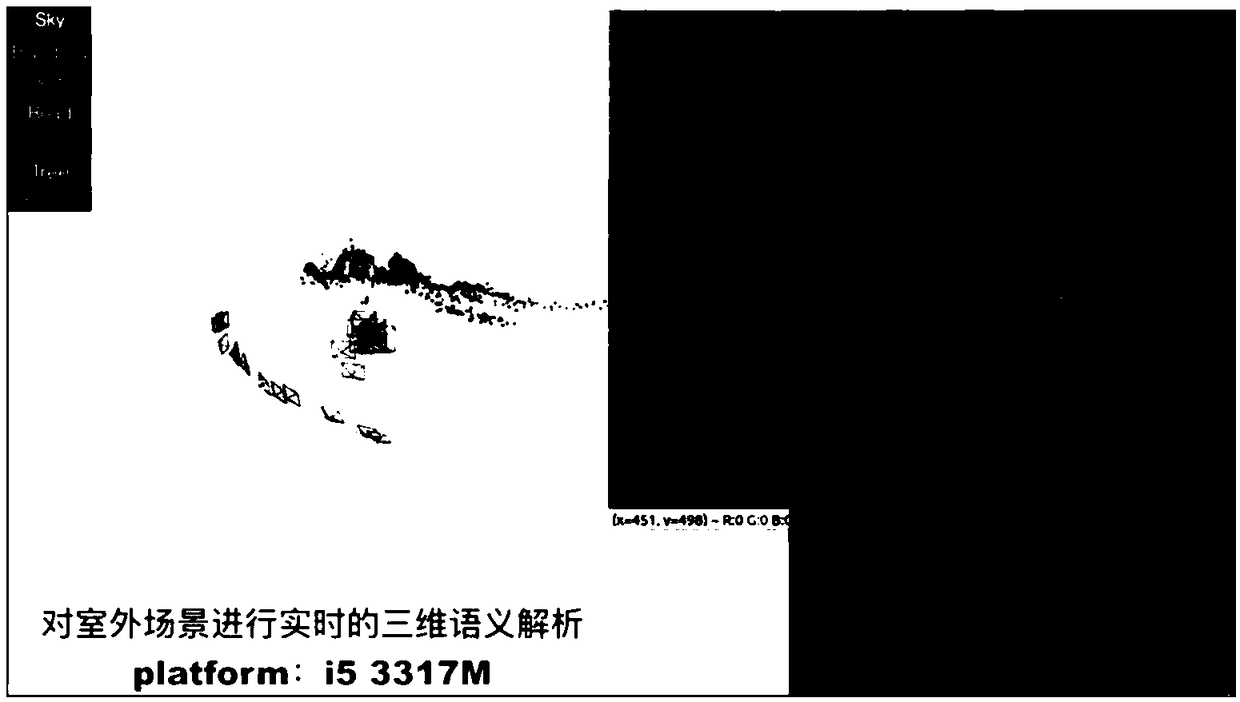
[0044] People can intuitively perceive the things displayed on the point cloud map, but for the robot, there is no difference between the three-dimensional points on the map, and the robot cannot recognize what exists in the current map. After semantic segmentation, the robot can distinguish the semantic categories in the point cloud. Therefore, the construction of semantic maps is very important for SLAM.
[0045] The point cloud is constructed by the RGBD camera and the three-dimensional point cloud features are extracted, and input to the pre-stored point cloud database for fast retrieval. If the point cloud is successfully matched with the object in the database, this point cloud is stored in the current map. Andrew uses the idea of two-dimensional image retrieval to retrieve three-dimensio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More