Method for rapidly tracking and positioning set targets in grayscale videos
A gray-scale video, tracking and positioning technology, applied in image data processing, instruments, calculations, etc., can solve the problems of complex tracking process, increased calculation amount and complexity, slowness, etc., and achieve high tracking accuracy, fast calculation speed, Effects of adaptation to scale changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051] In order to further explain the technical means and effects adopted by this embodiment to achieve the predetermined purpose, the specific implementation, structural features and effects of this embodiment will be described in detail below in conjunction with the accompanying drawings and embodiments.
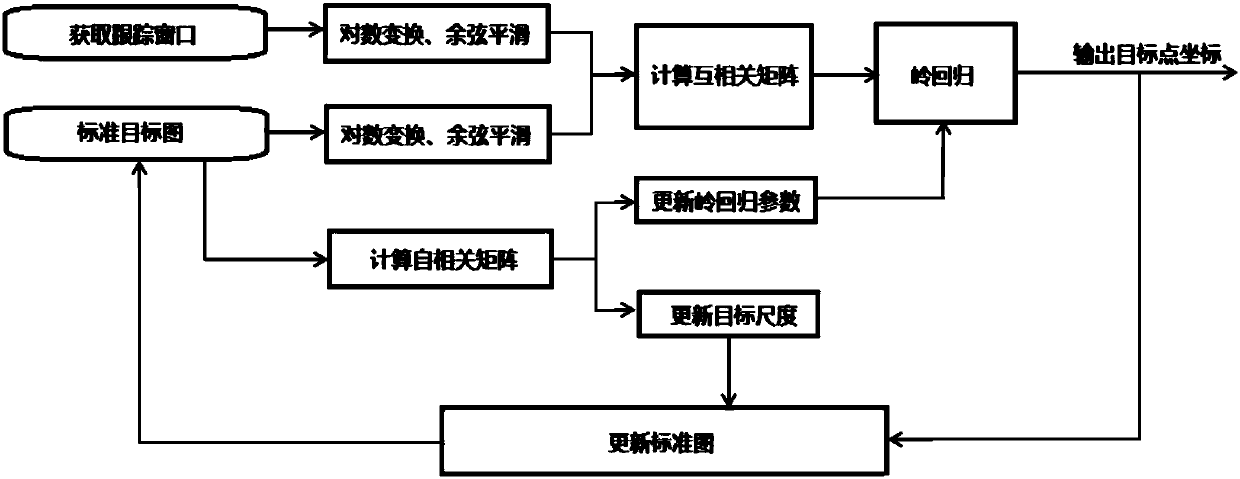
[0052] The technical solution adopted in this embodiment is mainly divided into four parts: a preprocessing stage, a tracking stage, a parameter learning stage, and a scale prediction stage. In the first frame, the position and size of the target in the first frame need to be artificially given, and then the original image is cropped to obtain a standard image centered on the tracking target.
[0053] Step 1. Obtain the tracking window of the current frame through the target coordinates and size calculated in the previous frame, and perform logarithmic transformation and cosine window smoothing on the tracking window and the standard target image respectively.
[0054] St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



