

Gait control method and device of multi-legged robot and robot
A multi-legged robot and gait control technology, applied in the field of robotics, can solve problems such as poor anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0020] According to an embodiment of the present invention, an embodiment of a gait control method for a multi-legged robot is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be implemented in a computer system such as a set of computer-executable instructions and, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
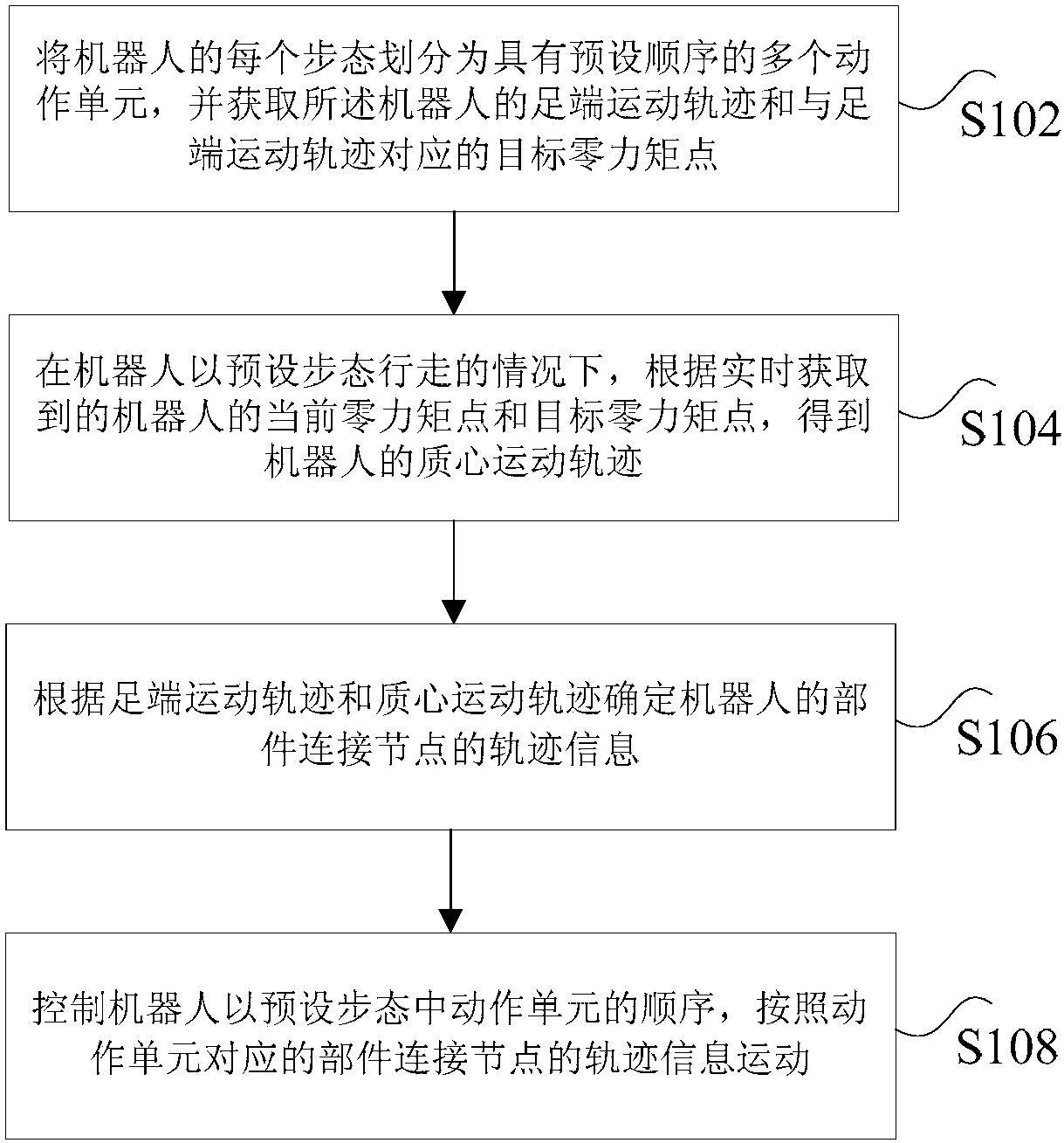
[0021] figure 1 is a flow chart of the gait control method of a multi-legged robot according to an embodiment of the present invention, as figure 1 As shown, the method includes the following steps:
[0022] Step S102, dividing each gait of the robot into a plurality of action units with a preset sequence, and obtaining the robot's foot end motion trajectory and the target zero moment point corresponding to the foot end motion trajectory.
[0023] Specifically, the gait can include: start, s...
Embodiment 2
[0079] According to an embodiment of the present invention, an embodiment of a gait control device for a multi-legged robot is provided, Image 6 is a schematic diagram of a gait control device for a multi-legged robot according to an embodiment of the present invention, such as Image 6 As shown, the device includes:
[0080] The first acquisition module 60 is configured to divide each gait of the robot into a plurality of action units with a preset order, and acquire the robot's foot end movement trajectory and the target zero moment point corresponding to the foot end movement trajectory.
[0081] Specifically, the gait can include: start, stop, normal walking, left turn, right turn, acceleration, deceleration, etc. Each gait is composed of multiple action units. When the robot receives an instruction to execute a certain gait, This gait can be completed by performing actions according to the action units in the preset sequence in this gait.
[0082] The above-mentioned r...
Embodiment 3
[0122] According to an embodiment of the present invention, a robot is provided, including any gait control device for a multi-legged robot in Embodiment 2.
[0123] The gait control devices of the multiple groups of robots included in the above-mentioned robots of the present application divide each gait of the robot into a plurality of action units with a preset order through the first acquisition module, and acquire the foot end motion trajectory and For the corresponding target zero-moment point, when the robot walks with a preset gait, the robot’s center-of-mass trajectory is obtained according to the current zero-moment point and target zero-moment point of the robot acquired in real time through the second acquisition module; A determination module determines the trajectory information of the robot's component connection nodes according to the foot end movement trajectory and the mass center movement trajectory; through the action module, the robot is controlled to act a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More