

Continuous mechanical-arm space obstacle avoidance trajectory planning method
A trajectory planning and robotic arm technology, applied in the field of robotics, can solve problems such as large amount of calculation and complex motion model, and achieve the effect of simple algorithm, simplified control, and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0049]The present invention will be further described below with reference to the accompanying drawings and in combination with preferred embodiments.
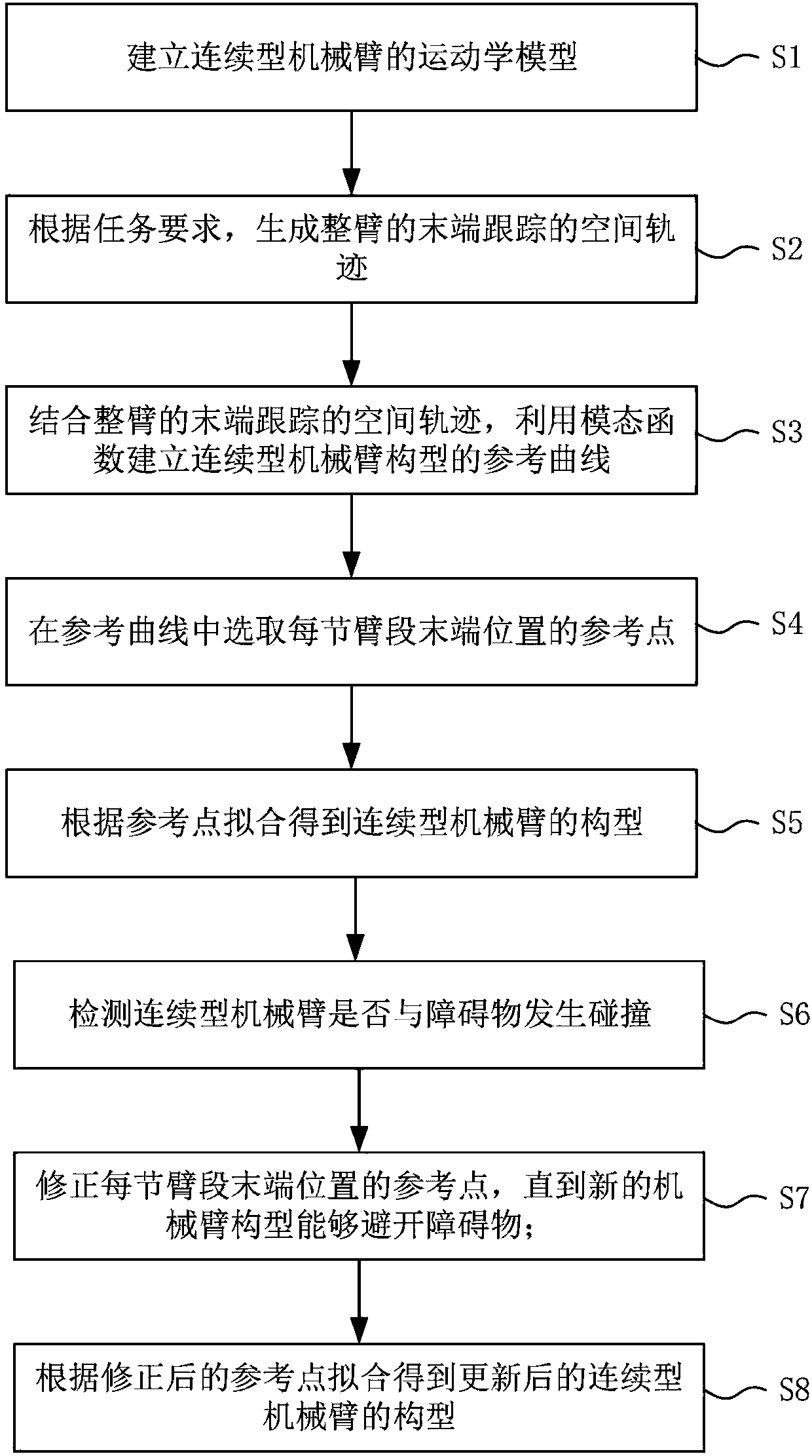
[0050] Such as figure 1 As shown, the preferred embodiment of the present invention discloses a continuous manipulator space obstacle avoidance trajectory planning method, comprising the following steps:
[0051] S1: Establish the kinematics model of the continuous manipulator.
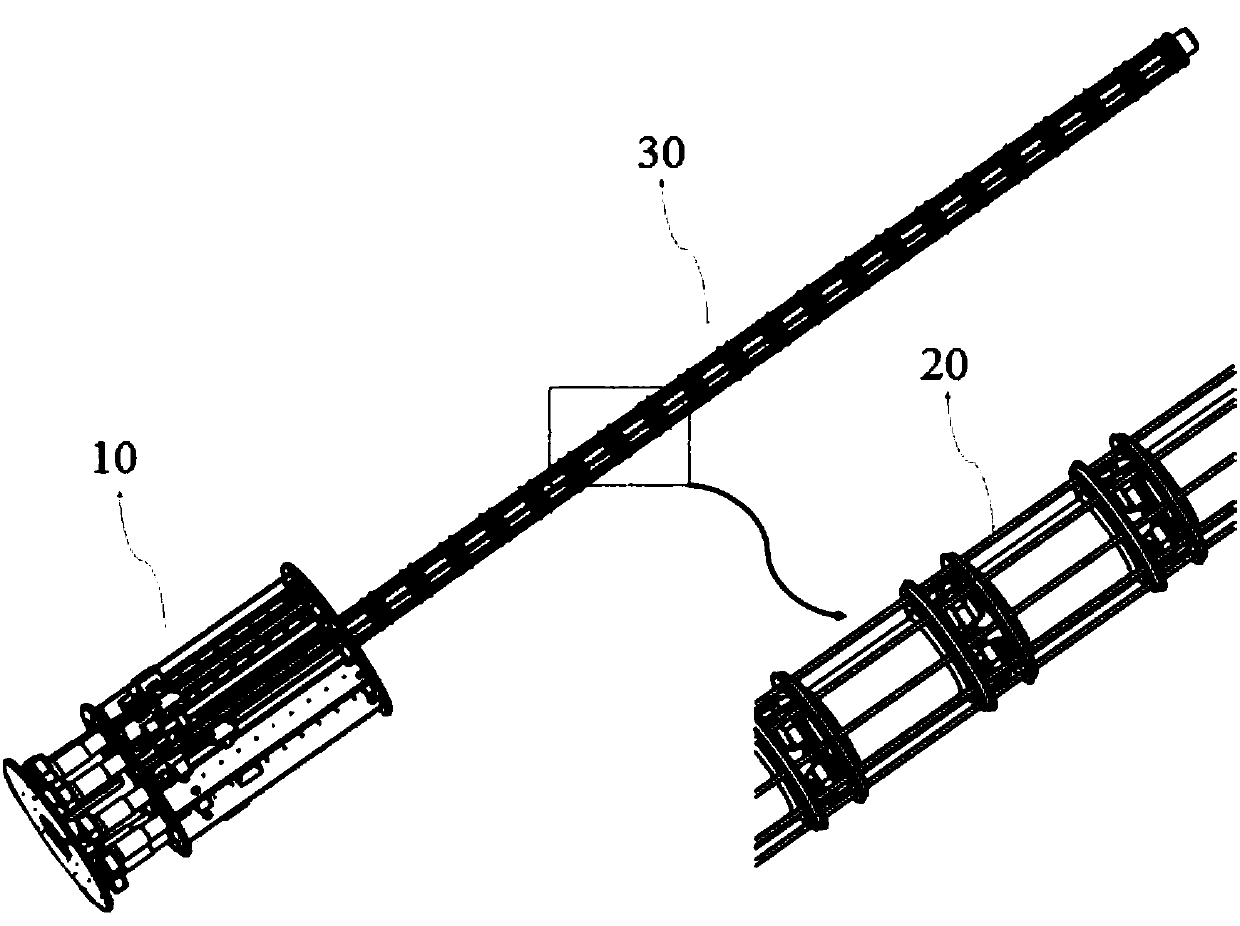
[0052] Such as figure 2 , in this embodiment, the continuous mechanical arm is made up of drive box 10, driving rope 20 and whole arm 30, wherein whole arm 30 is made up of multi-section arm sections, and each section arm section can be bent and deformed to obtain multi-section arm sections The homogeneous transformation matrix of the formed continuous manipulator is:
[0053]
[0054] in, i-1 T i is the homogeneous coordinate transformation matrix of a single boom segment, and M is the number of boom segments.
[0055] For the continuously ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More