

UAV trajectory planning method and device based on A* algorithm and storage device
A technology of trajectory planning and storage equipment, which is applied in the directions of measuring devices, instruments, surveying and mapping, and navigation, and can solve problems such as large air traffic flow, complex airspace structure, and high flight density
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] In order to make the purpose, technical solutions and advantages of the present invention more clear, the following will further describe the implementation of the present invention in conjunction with the accompanying drawings, and the specific technical details mentioned below, such as: methods, equipment, etc., are only to make readers better Understanding the technical solution does not mean that the present invention is limited to the following technical details.
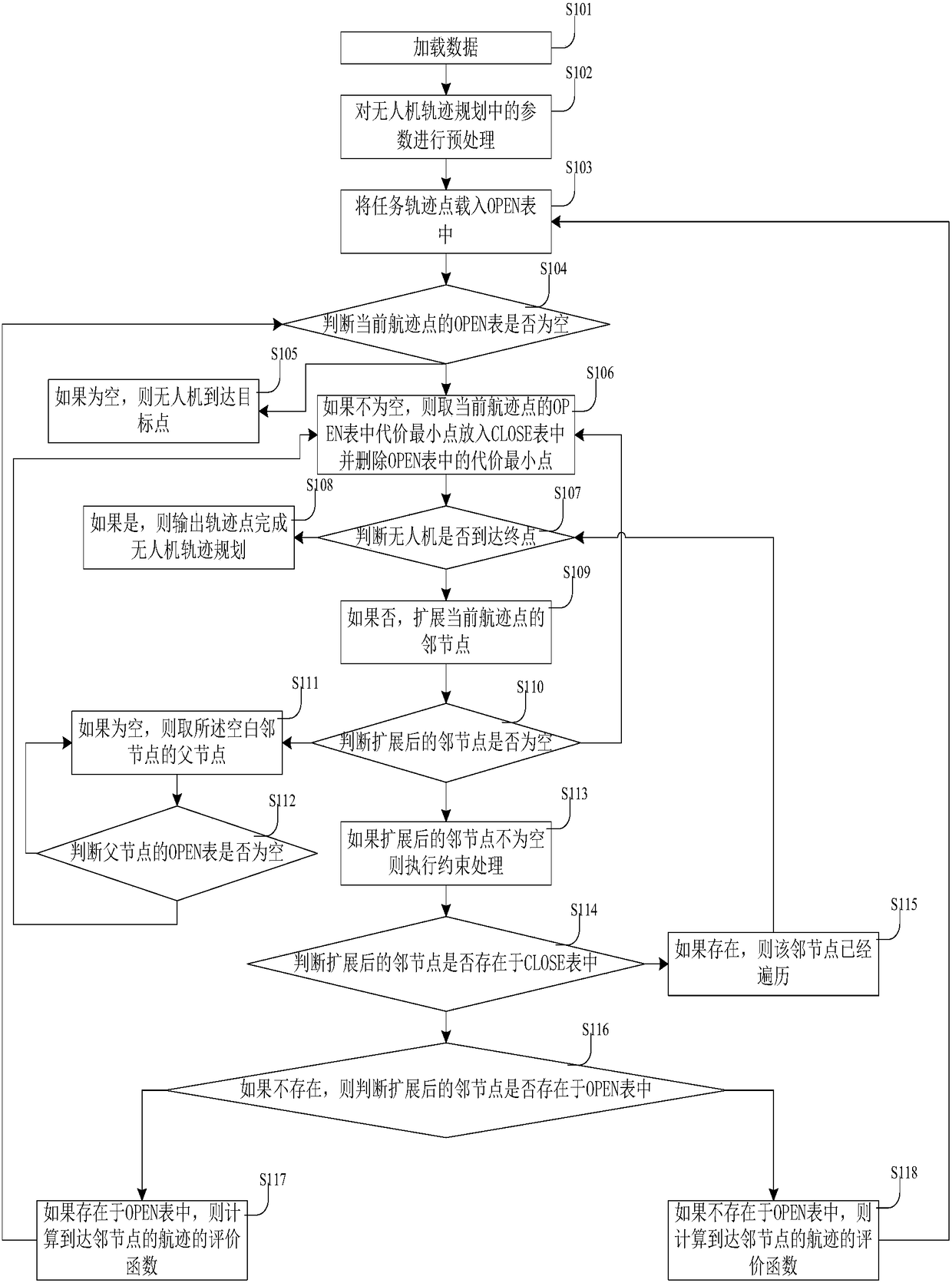
[0013] Embodiments of the present invention provide a UAV trajectory planning method, device and storage device based on the A* algorithm. see figure 1 , figure 1 It is the overall flowchart of the UAV trajectory planning method based on the A* algorithm in the embodiment of the present invention. The method is implemented by hardware devices, and the specific steps include:
[0014] S101: Loading data, specifically: reading parameters and start and end point data information from the XML file.
[001...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More