

Robot path planning method based on Bezier optimization genetic algorithm
A genetic algorithm and path planning technology, applied in the direction of instrumentation, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems that the robot cannot walk according to the planned path, the energy loss of the robot, etc., and achieve excellent search performance, reduced energy loss, and efficient mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
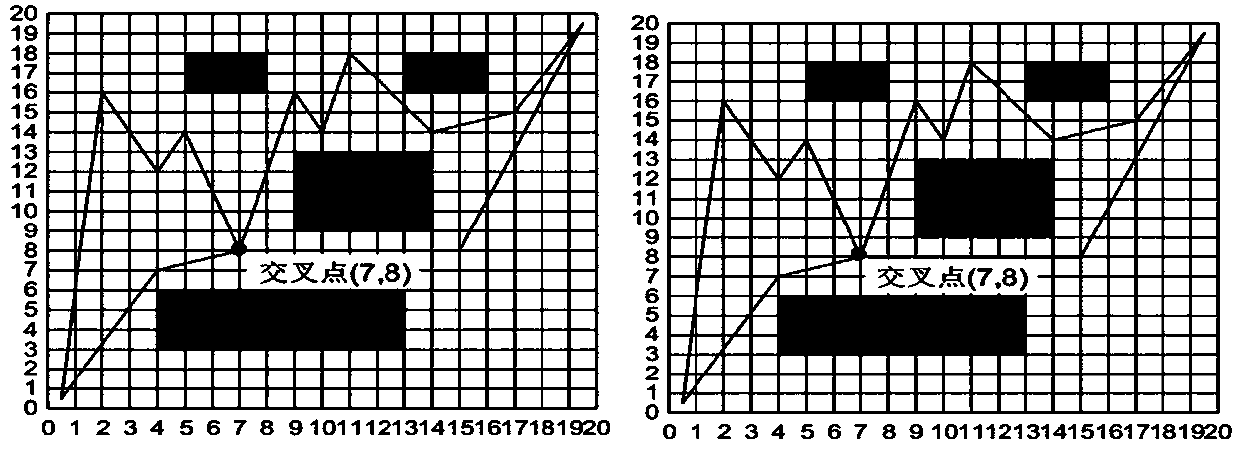
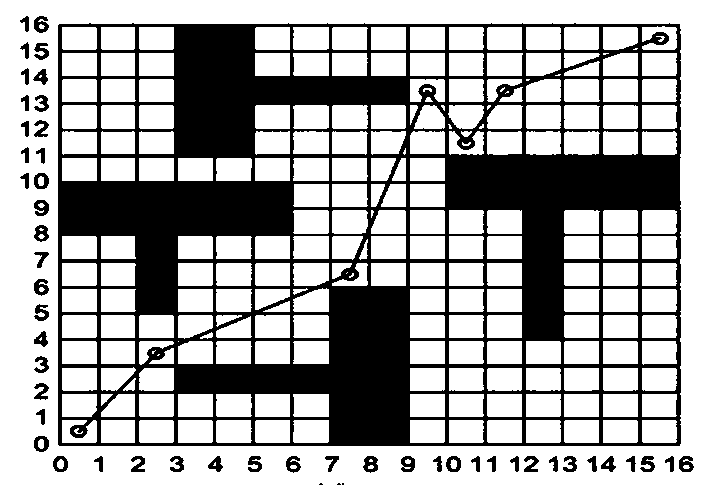
[0087] In order to reflect the feasibility and effectiveness of the algorithm, the robot path planning problem in environment 1: 20×20 and environment 2: 10×10 grid map environment is used for verification, as shown in Figure 6 As shown, in environment 1, the starting point coordinates of the robot are (0.5, 0.5), the end point coordinates are (19.5, 19.5), and the parameters are set as: Q=30, gn=50, N=30, Q max =30, Re=0.8, Mu=0.01, w 1 =0.9,w 2 =0.1, C=1. Such as Figure 7 As shown, in environment 2, the starting point coordinates of the robot are (0.5, 0.5), the end point coordinates are (9.5, 9.5), and the parameters are set as: Q=30, gn=50, N=30, Q max =30, Re=0.7, Mu=0.01, w 1 =0.9,w 2 =0.1, C=1. .
[0088] In order to investigate the feasibility of the algorithm in this paper, the traditional ant colony algorithm (ACA), the traditional genetic algorithm (GA), the improved ant colony algorithm fused with genetic operators (GA-ACO), and the fused Bezier optimizati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More