

Robot trace tracking control method and system
A robot system and trajectory tracking technology, applied in the general control system, control/adjustment system, adaptive control, etc., can solve random interference rounding errors, sampling delays, inability to achieve precise tracking of robots, and inconvenient use of control schemes And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings.
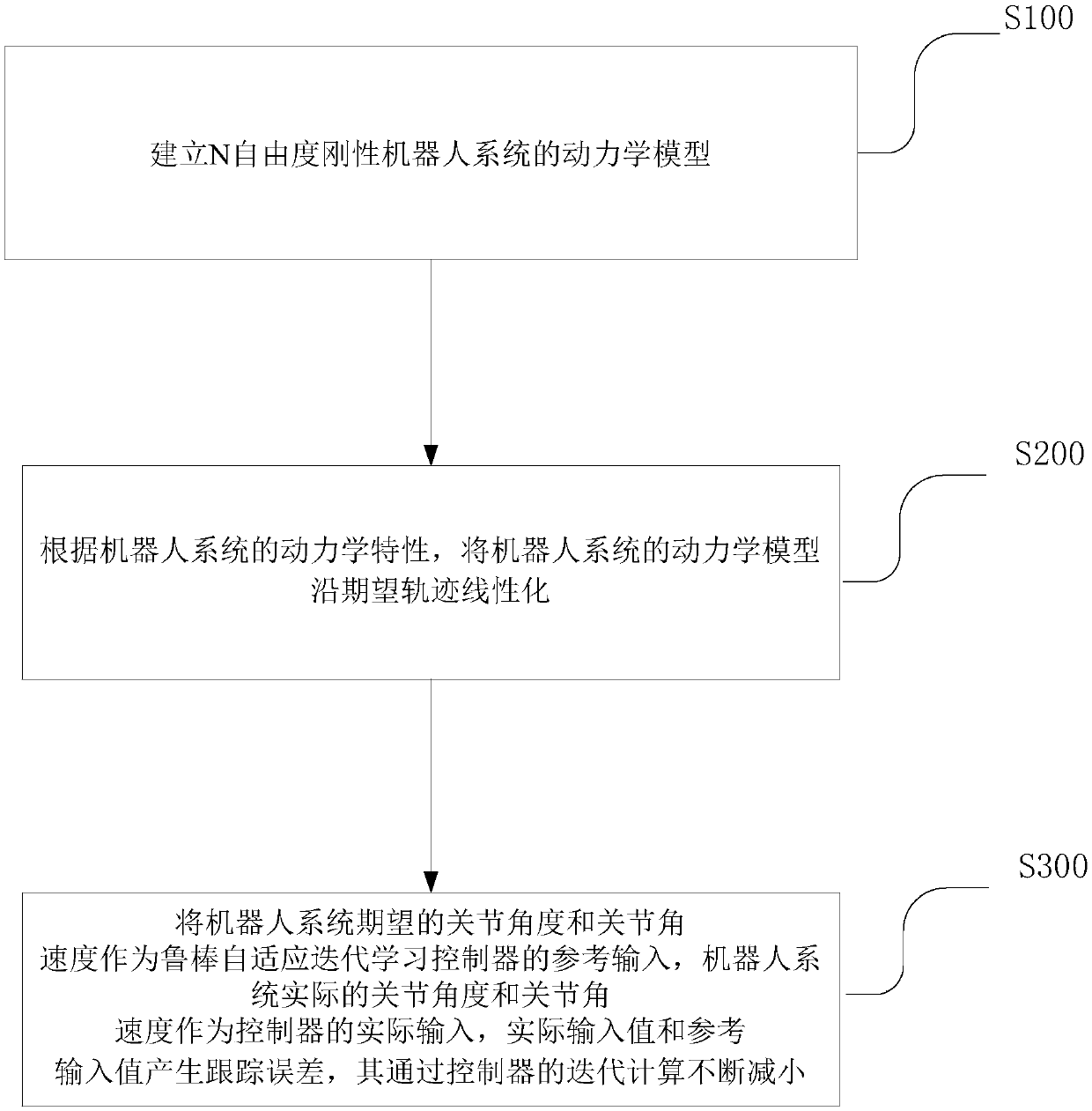
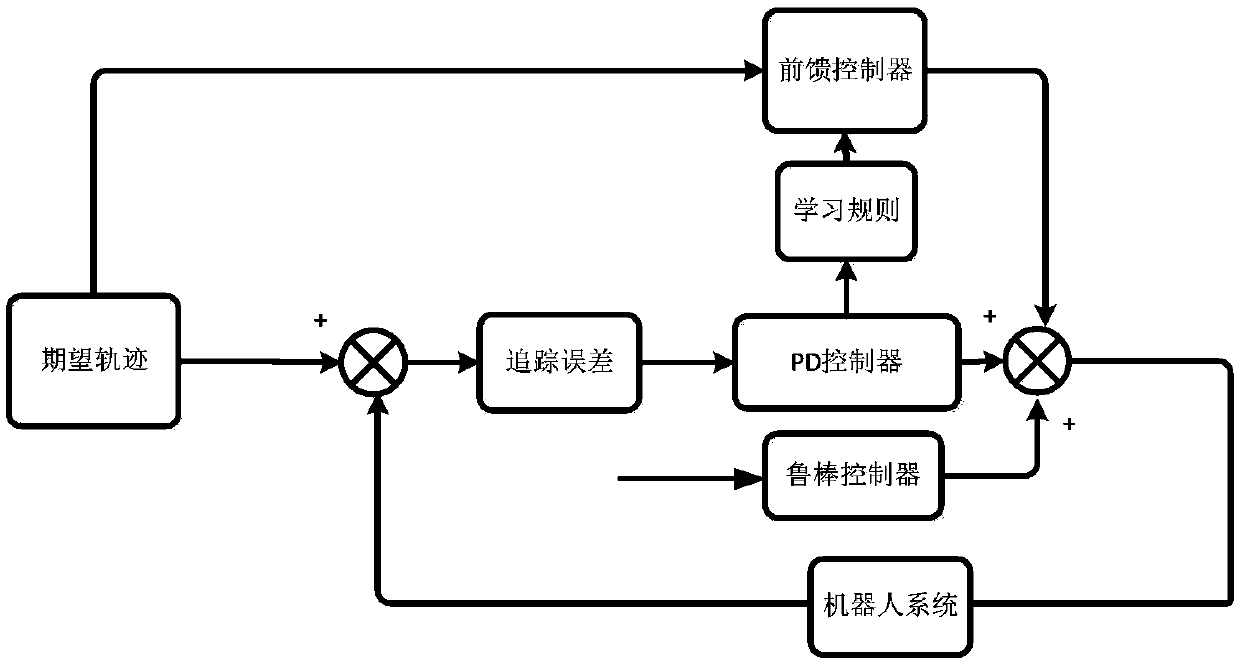
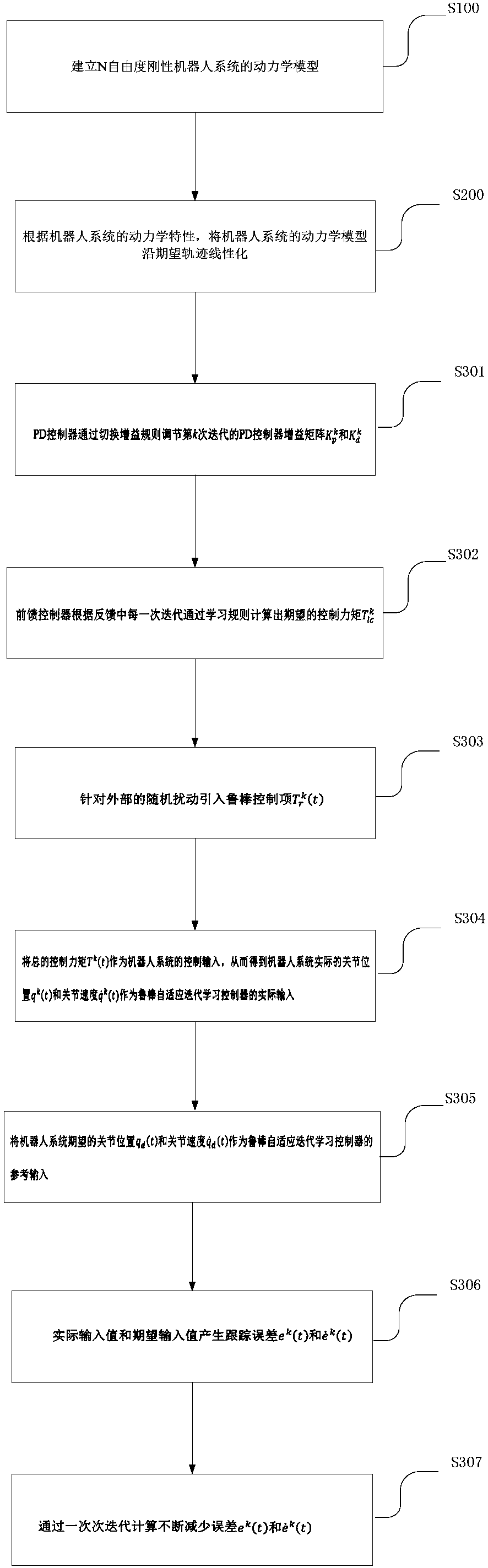
[0063] see figure 1 with figure 2 , figure 1 It is a flow chart of the robot trajectory tracking control method according to the first embodiment provided by the present invention, figure 2 A control principle block diagram of a robust adaptive iterative learning controller applied to a robot system provided by the present invention.
[0064] A robot trajectory tracking control method, said method comprising the following steps:
[0065] Step S100: establishing a dynamic model of the N-DOF rigid robot system;
[0066] According to the Lagrangian formula, the dynamic model of the N-DOF rigid robot system can be expressed as:
[0067]
[0068] Among them, t ∈ [0, tf], represents the time, k ∈ N, represents the number of iterations. q k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More