Underwater pipeline detecting and tracking device with autonomous remotely operated vehicle
A technology for remotely controlled submersibles and underwater pipelines. It is applied in pipeline systems, mechanical equipment, gas/liquid distribution and storage, etc. It can solve the problems that surface mother ships cannot monitor the underwater environment in real time, cannot realize real-time image transmission, and AUV loss. , to achieve the effects of image transmission, expanding the range of underwater movement, and improving underwater mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
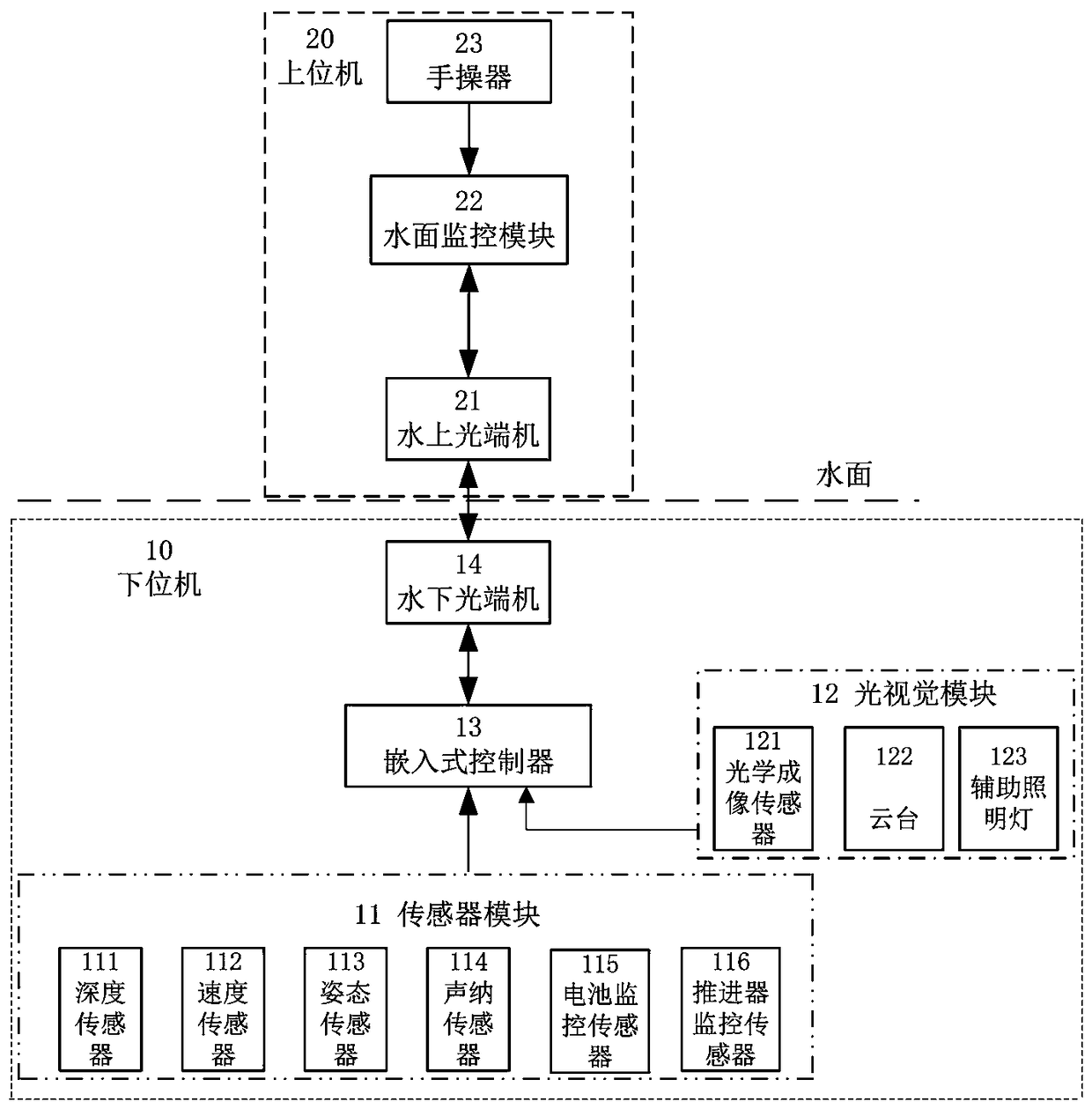
[0035] Such as figure 1 The shown a kind of autonomous remote control submersible underwater pipeline detection and tracking device comprises: lower computer 10 and upper computer 20, lower computer 10 is arranged under the water surface, upper computer 20 is arranged on the surface mother ship; this lower computer 10 and this The host computer 20 is connected by optical fiber. The lower computer 10 includes: a sensor module 11 , an optical vision module 12 , an embedded controller 13 and an underwater optical transceiver 14 . The sensor module 11 and the optical vision module 12 are respectively connected to the signal input end of the embedded controller 13 , and the signal output end of the embedded controller 13 is connected to the signal input end of the underwater optical transceiver 14 .
[0036]The opti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com