

Position coordination control method for multiple direct current brushless motors based on dynamic surface
A brushless DC motor and brushless motor technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as insurmountable disturbances, eliminate differential term expansion, and reduce chattering levels Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0125] The present invention will be further described below in conjunction with the accompanying drawings.
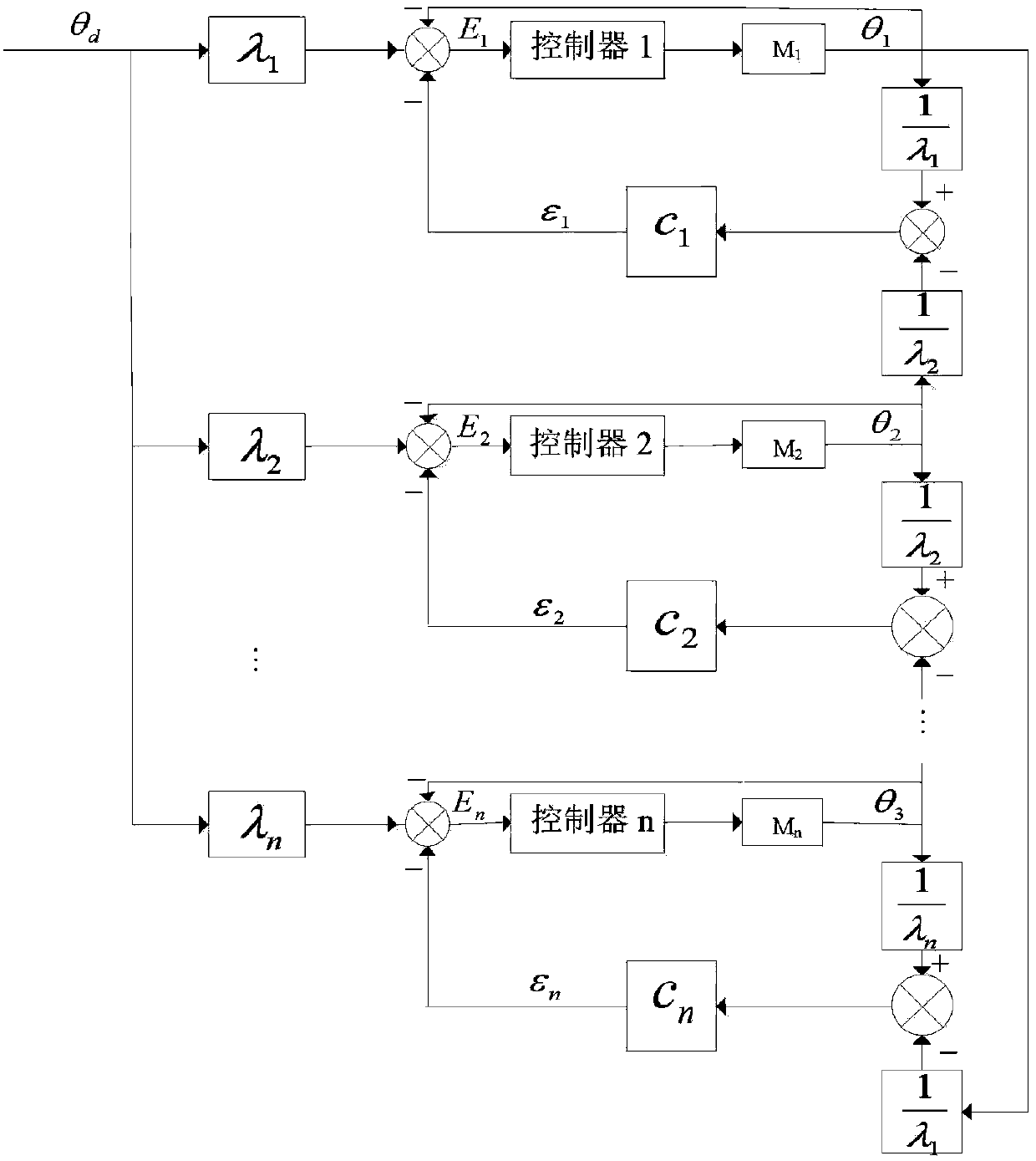
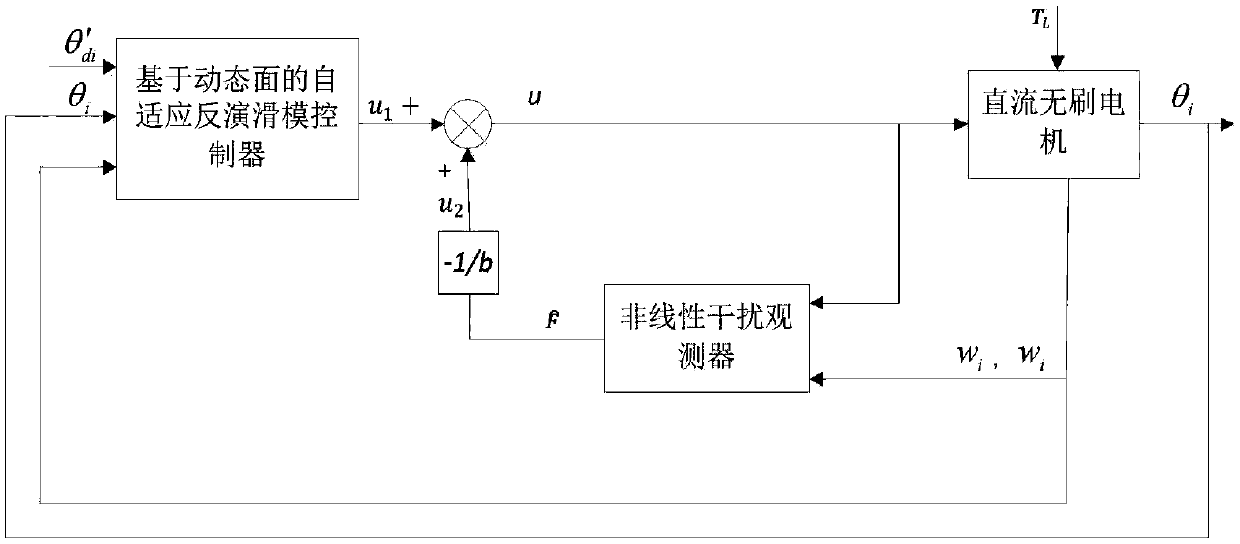
[0126] A position coordinated control system for multiple brushless DC motors based on dynamic surfaces, such as figure 1 and figure 2 shown. figure 2 In the block diagram of single-motor control, the unmodeled dynamics and external load disturbance of a single brushless DC motor are observed and compensated by a nonlinear disturbance observer to reduce the influence of single-motor disturbance on multi-motor position coordination control. use figure 1 The ring coupling strategy in the paper compensates the position coordination error among multiple brushless DC motors, figure 2 θ′ in di It is the given value for the position of the ith motor after the loop coupling compensation. final basis figure 1 and figure 2 , the design of the brushless DC motor with the introduction of position coordination error compensation and interference compensation is based on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More