

Robot based on three-dimensional (3D) technology, and telepresence method of mechanical arm state thereof
A robot and manipulator technology, which is applied in the field of telepresence of the state of the robot and its manipulator, can solve the problems of difficult to observe the global state of the robot, and it is difficult to intuitively judge the state of the manipulator of the robot, so as to achieve background transparency and guarantee Occupy the software interface, the effect of convenient human-computer interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
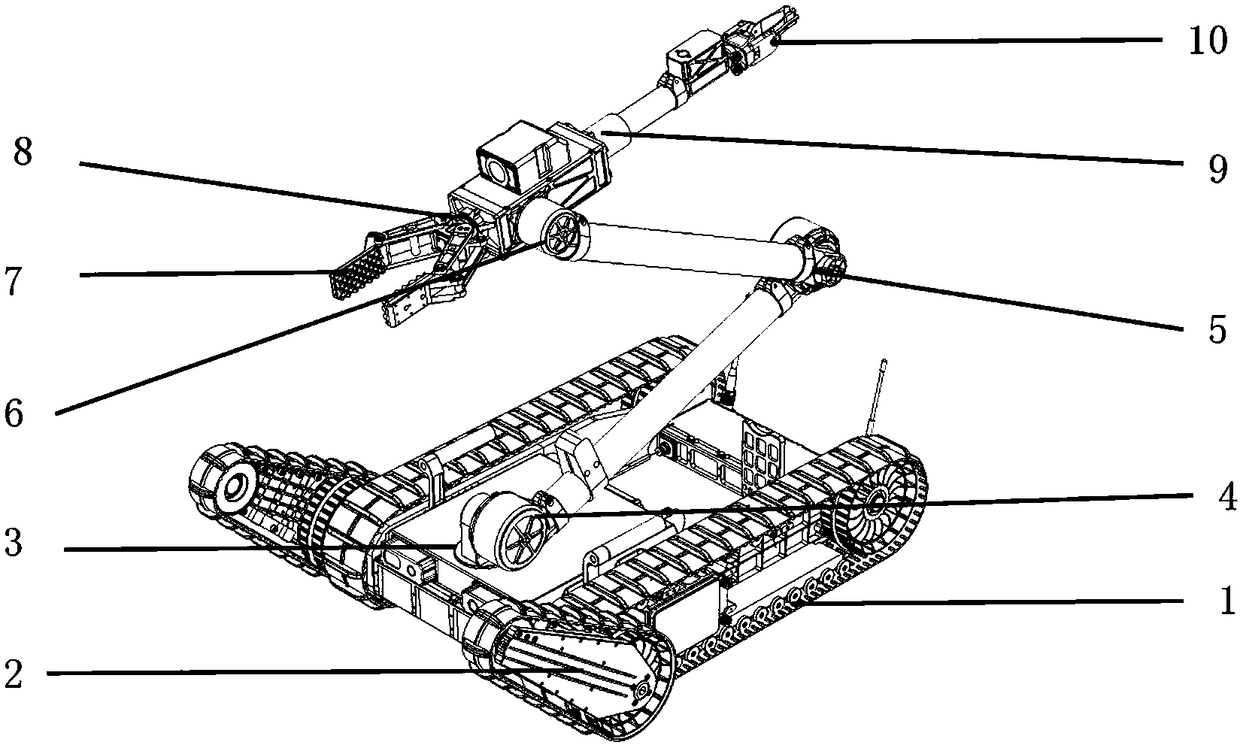
[0026] Such as figure 1 As shown, this embodiment provides a robot for telepresence using the above method. Among them, the arm joint 2 is connected with the chassis 1, the upper arm rotation joint 3 is connected with the chassis 1, the upper arm pitch joint 4 is connected with the upper arm rotation joint 3, the forearm pitch joint 5 is connected with the upper arm pitch joint 4, and the wrist pitch joint 6 It is connected with the forearm pitch joint 5, the front paw rotation joints 8 and 9 are connected with the wrist pitch joint 6, the front paw clamping joint 7 is connected with the front paw rotation joint 8, the rear paw clamping joint 10 and the rear paw The rotary joint 9 is connected.
Embodiment 2
[0028] This embodiment provides a method for displaying information on the connection status (ie angle) of each component in the robot described in Embodiment 1 in real time on a remote computer. Described method is specifically:
[0029] The angle sensor data of each joint of the robot is collected through the robot angle acquisition module, and converted to obtain real angle data;
[0030] Collect the corresponding data of the robot's three-axis gyroscope, three-axis accelerometer and three-axis magnetometer through the robot attitude data acquisition module, and obtain the real-time attitude data of the robot through calculation;
[0031] Pack the angle data and the posture data of the robot through the robot data transmission module, and wirelessly transmit the relevant data of the robot to the remote computer through the data transmission module;
[0032] The remote computer receives the data packet of the robot and analyzes the data packet to obtain corresponding attitu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More