Freight transport planning and management method and system based on intelligent traffic light OD information examination
An information inspection and management method technology, applied in the field of intelligent transportation, can solve the problems of inability to accurately predict the next time period, inability to manage road traffic, inability to predict and monitor the state of trucks, etc., to achieve accurate data and avoid road congestion. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
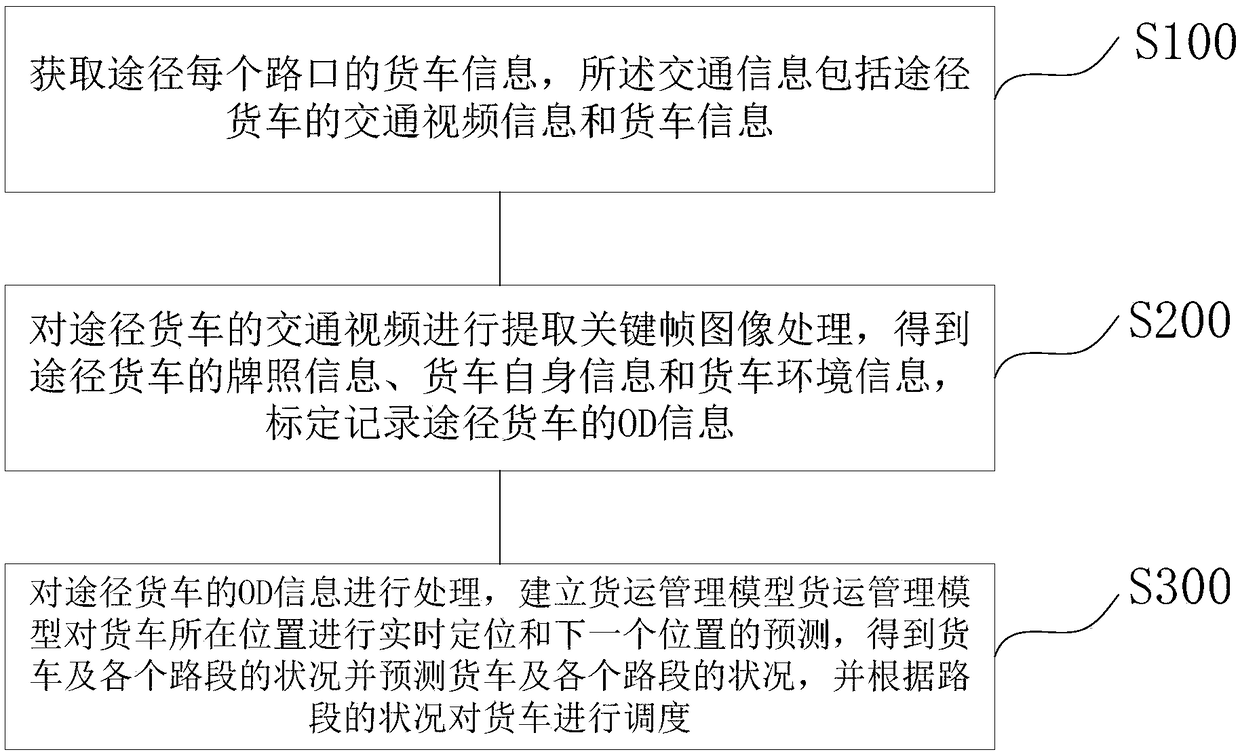
[0042] A freight planning management method based on OD information inspection of intelligent traffic lights, such as figure 1 shown, including the following steps:
[0043] S100. Obtain information about trucks passing through each intersection, where the traffic information includes traffic video information and information about trucks passing through trucks;
[0044] S200, extract key frame image processing on the traffic video of the passing truck, obtain the license plate information of the passing truck, the information of the truck itself, and the environmental information of the truck, and calibrate and record the OD information of the passing truck;
[0045] S300. Process the OD information of passing trucks, and establish a freight management model. The freight management model performs real-time positioning on the location of the truck and predicts the next position, obtains the status of the truck and each road section, and predicts the status of the truck and eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More