

High-tension transmission line corridor branch trimming robot walking along ground wire and control method
A high-voltage transmission line and robot technology, applied in overhead lines/cable equipment, manipulators, manufacturing tools, etc., can solve problems such as being unsuitable for forests, social conflicts or disputes, and difficult to control work quality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0039] One, at first introduce the concrete structure of the present invention
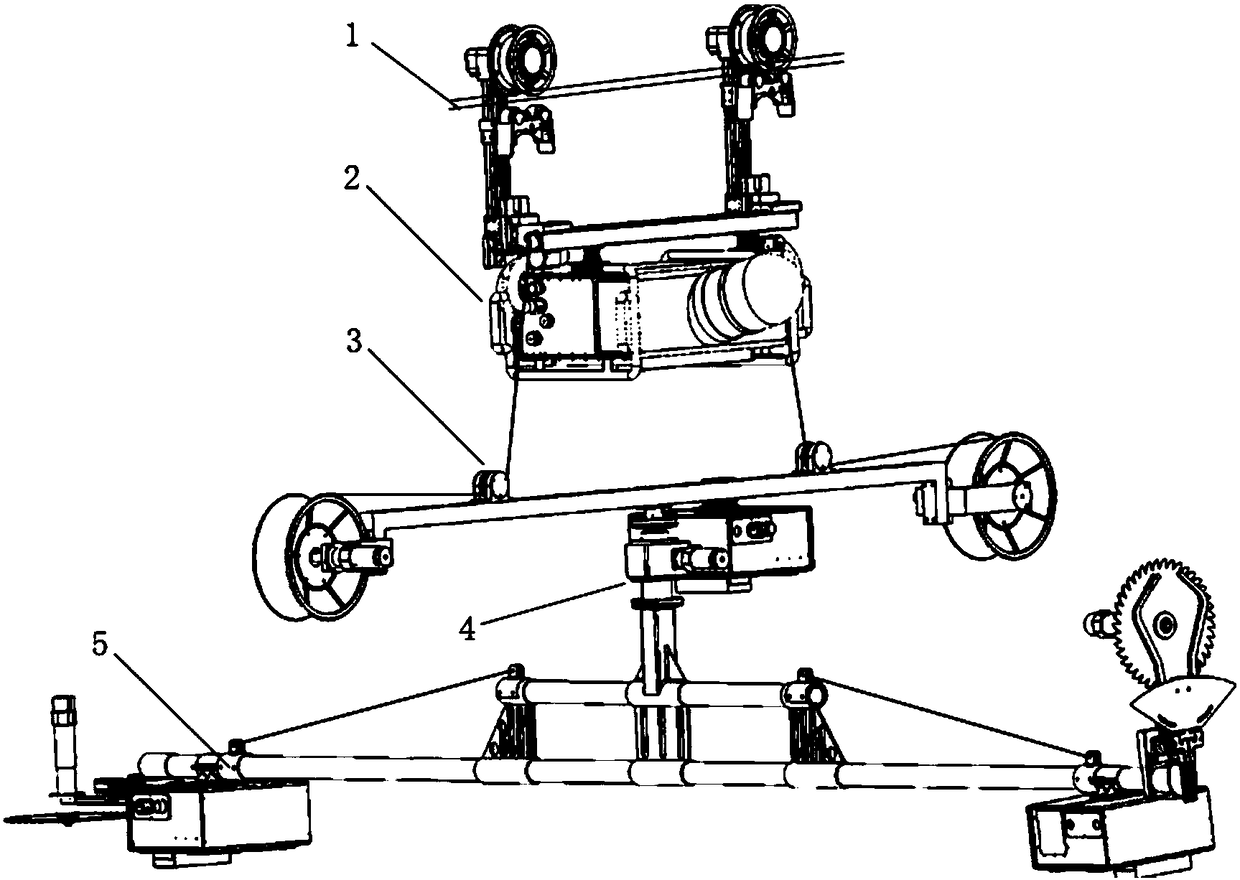
[0040] Such as figure 1 As shown, the present invention relates to a branch pruning robot walking along the corridor of high-voltage transmission line along the ground line, mainly including a mobile robot platform 2 walking along the ground line, and an insulating rope winch hoisting and lifting on the mobile robot platform 2 through an ultra-long insulating rope The platform 3, the rotary mechanism 4 connected to the insulating rope hoisting and lifting platform 3 through the flange, and the end trimming mechanism 5 connected to the rotary mechanism 4 in the same way as the flange connection, have four parts in total.
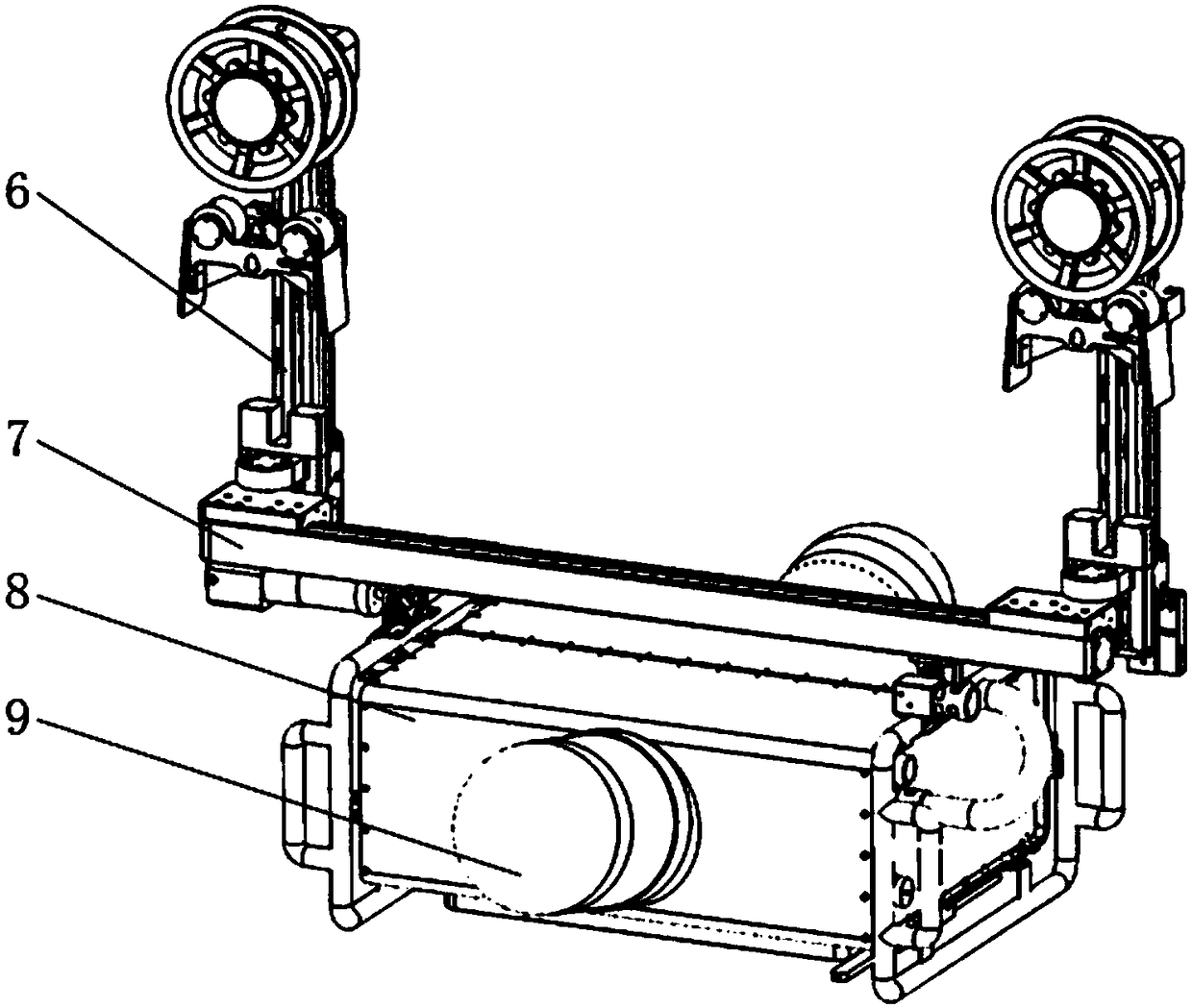
[0041] Such as figure 2 As shown, the mobile robot platform 2 includes two sets of symmetrically distributed walking arm mechanisms 6, a body 7, and a control box 8 for controlling the entire mobile robot platform 2 to walk on the ground and overcome obstacles. Two pan-tilt ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More