

A Pole Climbing Robot with Rapid Height Adjustment
A technology of height adjustment and robot, which is applied in the direction of unmanned aircraft, motor vehicles, aircraft, etc., can solve the problems that affect the working efficiency of robots, affect the application of pole-climbing robots, and the weight of pole-climbing robots, so as to achieve the convenience of carrying different The effect of simple equipment, simple structure and stable work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
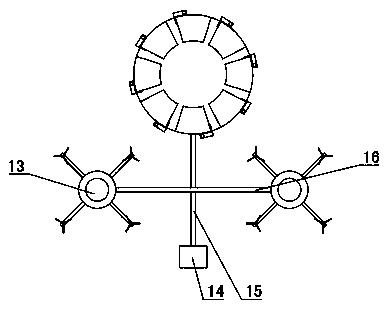
[0044] Such as figure 1 Shown: In this embodiment, there are two lifting drones 13, and the distance between the two lifting drones 13 is greater than the outer diameter of the main body of the pole-climbing robot. A lifting rod 16 is arranged between the two lifting drones 13, and both ends of the lifting rod 16 are fixedly connected to the two lifting drones 13 respectively. A plurality of lifting drones 13 can also be provided, and a plurality of lifting drones 13 are respectively arranged on both sides of the connecting line between the counterweight 14 and the main body of the pole-climbing robot.
[0045] A counterweight installation rod 15 is arranged between the pole climbing robot main body and the counterweight 14, and one end of the counterweight installation rod 15 is connected with the outside of the pole climbing robot main body, and the other end is connected with the counterweight 14, and the middle part of the lifting rod 16 is installed with the counterweight...
Embodiment 2
[0066] Such as Figure 9 Shown: the difference between embodiment 2 and embodiment 1 is that: the mounting frame 101 of the main body of the pole climbing robot is a box with an inner opening, and the climbing assembly 1 is a triangular ring surrounded by a plurality of mounting frames 101, so that it can Adapt to the pole climbing action of triangular posts or ropes.
Embodiment 3
[0068] Such as Figure 10 As shown: the difference between Embodiment 3 and Embodiment 1 is that the climbing assembly 1 of the main body of the pole-climbing robot is a concave polygonal ring surrounded by a plurality of mounting frames 101, so that it can adapt to a concave polygonal column or Rope climbing action.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More