

H8 fault tolerance control method for networked linear parameter variation system with time variation and time delay
A linear parameter change, fault-tolerant control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as property loss, even casualties, and difficult repairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
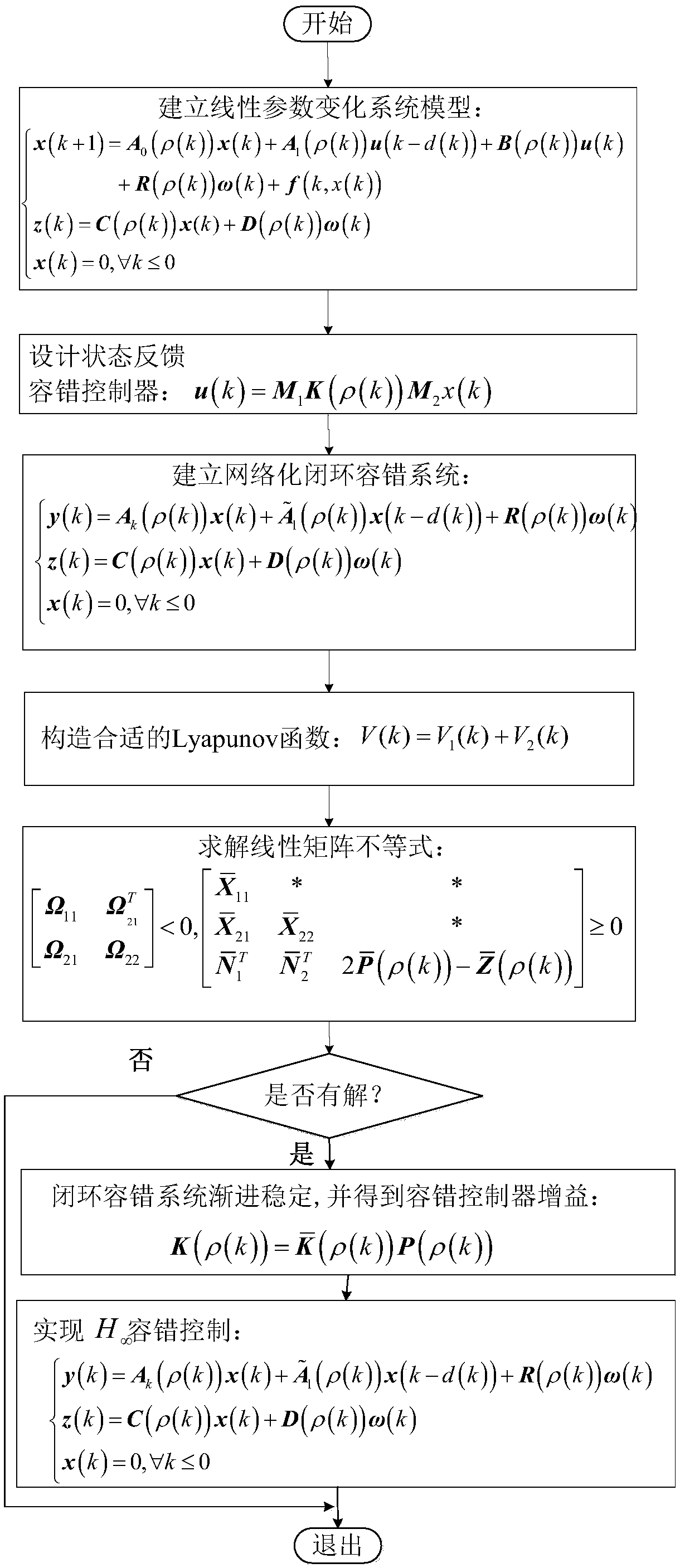
[0054] as attached figure 1 As shown, the H of a class of networked linear parameter changing system with time-varying delay ∞ A fault-tolerant control method, comprising the following steps:
[0055] Step 1: Establish a linear parameter changing system model with time-varying delay as formula (1).
[0056] Step 2: Design the state feedback controller as formula (2), and establish the closed-loop fault-tolerant control system of networked linear parameter change system with time-varying time delay as formula (3).
[0057] Step 3: Construct the Lyapunov function as formula (4).
[0058] Step 4: Based on the Lyapunov function constructed in step 4, using the Lyapunov stability theory and linear matrix inequality analysis method, the closed-loop fault-tolerant control system with time-varying delay and networked linear parameter variation system is asymptotically stable and H ∞ The sufficient condition for the existence of the controller is that matrix inequalities (5) and (6)...
Embodiment 2
[0062] Adopt the H of a class of networked linear parameter change system with time-varying time delay that the present invention proposes ∞ The fault-tolerant control method, the specific implementation method is as follows:
[0063] A wind energy generator is transformed into a linear parameter change system, its mathematical model is formula (1), and its system parameters are given as:
[0064]
[0065]
[0066]
[0067]
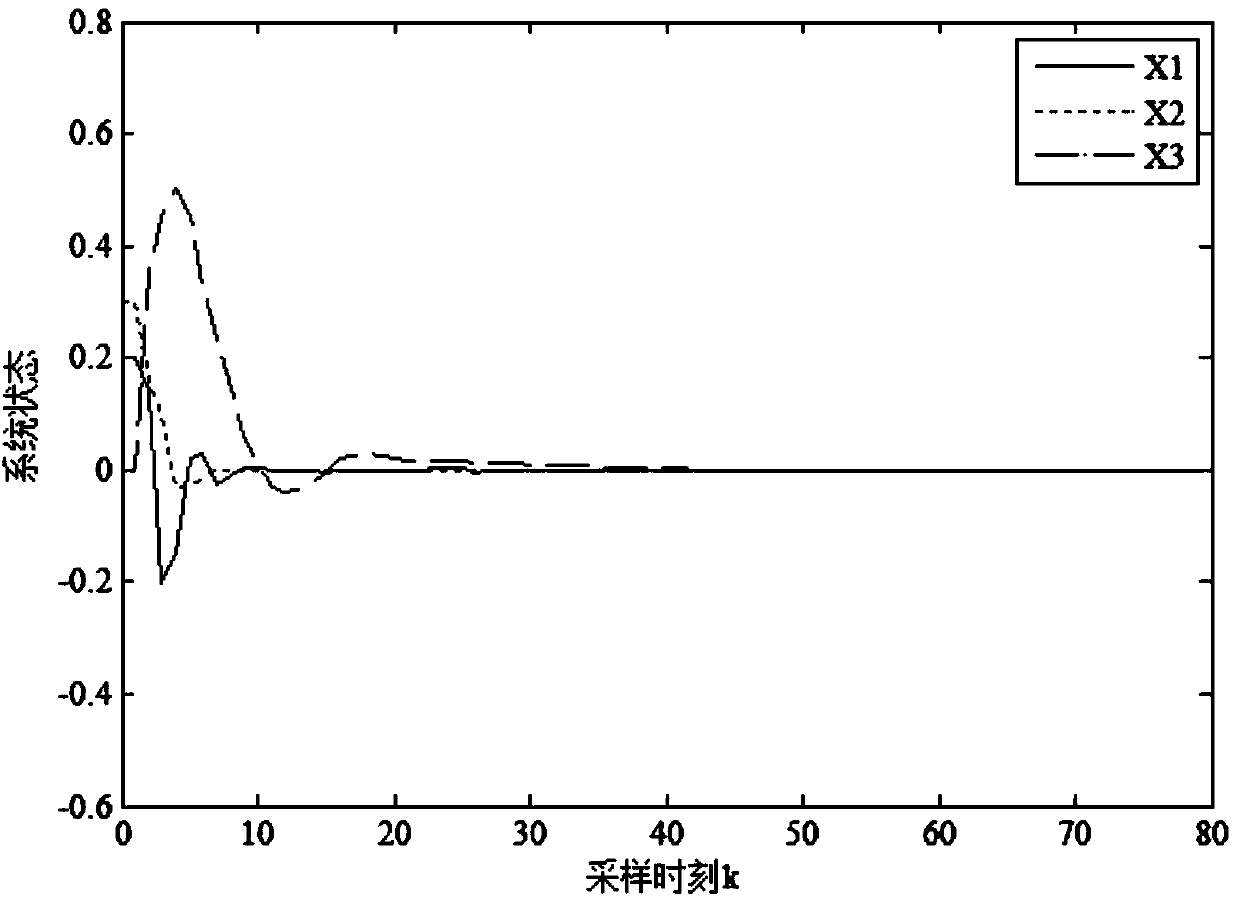
[0068] Among them, ρ(k)=sin(k) 2 is a time-varying parameter, and the disturbance signal is selected as ω(k)=e -0.1ksin(πk) .
[0069] Choose 3 random failure scenarios:
[0070] a) Actuator random failure M 1 expectations for The mean square error is α 2 =diag{0.3,0.2,0.1}, the expectation of random sensor failures The mean square error is β 2 =diag{0.2,0.2,0.1}, delay upper bound d 2 = 2;
[0071] b) The expected random failure of the actuator is The mean square error is α 2 =diag{0.3,0.2,0.1}, the expectation of random sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More